- 产品描述
在Linux系统中经常会遇到各种编译程序的方法。很多情况下我们只知道这样做而不知道为什么这样做。这篇文章就通过一个简单的helloworld程序来通过不同的编译方式进行编译。让大家了解一下比较常见的各种编译系统。编译过程**重要的地方就是*头文件和链接库的位置。主要问题在于软件的模块化和依赖关系。所以不同的编译系统采用了不同的方式进行管理。具体可以登陆蓝鲸智能官网或者论坛查阅。在Linux系统中经常会遇到各种编译程序的方法。很多情况下我们只知道这样做而不知道为什么这样做。这篇文章就通过一个简单的helloworld程序来通过不同的编译方式进行编译,广西导航机器人运输,广西导航机器人运输,广西导航机器人运输。让大家了解一下比较常见的各种编译系统。编译过程**重要的地方就是*头文件和链接库的位置。主要问题在于软件的模块化和依赖关系。所以不同的编译系统采用了不同的方式进行管理。具体可以登陆蓝鲸智能官网或者论坛查阅。针对于无轨机器人的全局调度系统解决方案。广西导航机器人运输
蓝鲸自动充电模块利用充电桩的红外信号进行定位,实现机器人底盘的自动充电功能。用户只需要分别将充电桩固定在墙角,充电模块固定在机器人底盘的合适位置上就可以开始使用了。用户通过程序向机器人发送开始充电的信号,机器人底盘即可开始自动的向充电桩移动,完成充电过程。蓝鲸自动充电模块利用充电桩的红外信号进行定位,实现机器人底盘的自动充电功能。用户只需要分别将充电桩固定在墙角,充电模块固定在机器人底盘的合适位置上就可以开始使用了。用户通过程序向机器人发送开始充电的信号,机器人底盘即可开始自动的向充电桩移动,完成充电过程。江西SLAM机器人开发并联机器人和串联机器人人已经成为工业机器人领域齐驱并进的两架“马车”,共同推动工业机器人向前发展。
自主移动机器人近年来**发展,其背后基于slam(同步定位与建图)的导航控制系统是自主移动的关键技术。但是现有的导航控制系统大都是使用激光雷达传感器,**激光雷达成本高昂,而低成本版本的激光雷达适应性又很差。单目视觉slam技术因为只使用一个普通摄像头,成本有很大优势,同时又能利用图像丰富的3d信息使定位较稳定,动态环境适应性较好。自主移动机器人近年来**发展,其背后基于slam(同步定位与建图)的导航控制系统是自主移动的关键技术。但是现有的导航控制系统大都是使用激光雷达传感器,**激光雷达成本高昂,而低成本版本的激光雷达适应性又很差。单目视觉slam技术因为只使用一个普通摄像头,成本有很大优势,同时又能利用图像丰富的3d信息使定位较稳定,动态环境适应性较好。
本人是在蓝鲸智能机器人(深圳)有限公司任技术总监,和大家聊聊线程和协程的话题,在写程序的时候为了提高执行效率经常会用到线程.把任务分配到不同的线程里面同时执行,这样即使其中一个被阻塞了,程序还是可以运行,程序运行效率得到了很大的提高.线程是一个经常用到的概念这里就不多说了.但是随着大家使用的线程越来越多,线程的劣势就越来越明显了.****的就是c10k问题.c10k问题是在写服务器程序时遇到的.如何使一个服务器同时和10K个客户端保持网络连接?一般的做法是给每个连接开一个**的线程,但是这样就会有上万个线程.大量的资源被浪费在线程的管理上.线程已经无法再胜任这个任务了.在javascript中处理异步问题的方式给了我们很好的思路.javascript程序是单线程的,也就是某一时刻只能有一个程序在运行.但是javascript却可以很好的处理异步问题.蓝鲸智能带你认识AI Planning。
蓝鲸智能轮毂电机驱动器提供电机速度闭环控制,控制精度在1%以内。最大功率1080W(单路540W)。工作电压12V到36V(支持锂电池)。尤其在低速条件下,我们的性能远远**过市场上的其他驱动器。不仅如此,我们还提供这款驱动器的ROS驱动程序。这样您可以在ROS中直接控制电机运动。同时此驱动器还提供9轴陀螺仪数据,里程计数据。方便继续开发ROS相关的导航程序。并且此驱动器可以选配红外传感器和超声波传感器,直插即可。蓝鲸智能轮毂电机驱动器性能强大功能齐全,是机器人开发的**方案。 为了与周边系统及相应操作进行联系与应答,还应有各种通讯接口和人机通信装置。广西导航机器人运输
整体来讲,并联机器人和串联机器人在应用上构成互补关系,各有优势。广西导航机器人运输
IP分配的方式一般是由路由器决定的。路由器有DHCP方式和静态IP两种方式。DHCP就是动态的分配IP方式。一般路由器默认的就是这种模式。在这种模式下电脑也可以设置自己的静态IP。当然并不能**一定会成功,比如自己设定的IP可能被别人占用。也有可能路由器由于迷之原因不给你分配自己设定的IP。通过路由器设置静态IP是**简单的方法。不过前提是你要有路由器的管理权限,路由器也要支持这种设置功能。首先在浏览器中输入路由的地址,进入路由器的管理界面。在应用管理中有IP和MAC绑定。不同的路由器设置界面不一样,可以找一找这个功能的具**置。还有其他操作方式可以登录蓝鲸智能机器人论坛详细查看。广西导航机器人运输
蓝鲸智能机器人(深圳)有限公司致力于机械及行业设备,是一家生产型公司。蓝鲸智能机器人致力于为客户提供良好的通用机器人无轨导航系统,机器人SLAM导航方案,ROS自动充电模块,无轨AGV/AMR,一切以用户需求为中心,深受广大客户的欢迎。公司从事机械及行业设备多年,有着**的设计、强大的技术,还有一批**化的队伍,确保为客户提供良好的产品及服务。在社会各界的鼎力支持下,持续**,不断铸造高质量服务体验,为客户成功提供坚实有力的支持。
蓝鲸智能机器人深圳有限公司成立于2015年,为地区**企业,简称蓝鲸智能,蓝鲸智能研发团队人员在机器人领域有多年研究开发经验。蓝鲸智能拥**器人视觉导航、激光雷达导航以及融合导航系统方面完整、**的解决方案。蓝鲸智能致力于提供**高性价比的机器人自主移动系统,应用在扫地机、服务机器人、安防机器人、工业AGV、AMR和无人叉车等产品上。蓝鲸智能已经为上百家家机器人相关企业提供了稳定**的解决方案。 蓝鲸智能将会推出功能丰富的智能移动产品以及解决方案,期待您的合作!
欢迎来到蓝鲸智能机器人(深圳)有限公司网站,我公司位于经济发达,交通发达,人口密集的中国经济中心城市—深圳。 具体地址是广东深圳龙岗区公司街道地址,负责人是杨乐。
主要经营通用机器人无轨导航系统|机器人SLAM导航方案|ROS自动充电模块|无轨AGV/AMR。
单位注册资金:人民币 10 万元 - 30 万元。
本公司在机械产品这一领域倾注了无限的热忱和激情,公司一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌,携手共创美好明天!
本页链接:http://www.cg160.cn/vgy-91399288.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 我要给“广西导航机器人运输 蓝鲸智能机器人供应”留言
- 更多产品

六盘水当地板材橱柜设计 欢迎咨询 贵州邦卡商贸供应

浙江电磁流量计计量校准校验 天溯计量供应

江苏省PP料塑料破碎机优惠货源 贴心服务 恩派特环保供应
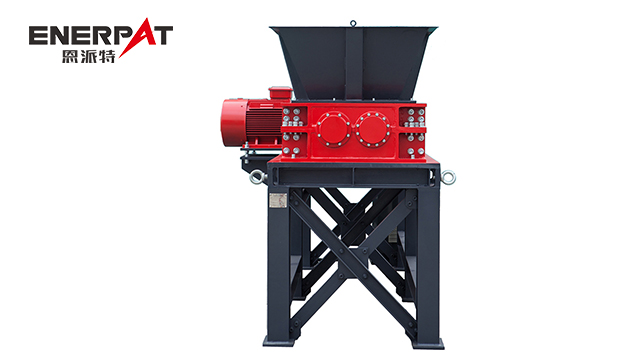
江苏省塑料瓶塑料破碎机稳定性高 来电咨询 恩派特环保供应

邢台比较好的网络推广有什么 邢台恺信网络科技供应

邢台什么是网络推广服务热线 邢台恺信网络科技供应

四川医药中间体铝生产厂家 创新服务 扬州中天利新材料供应

大连辐照交联低烟无卤电缆优势 辽宁鑫辽北电缆供应

袋用提手现货 昆山市极点精密模具供应

南昌袋用飞机孔挂钩作用 昆山市极点精密模具供应

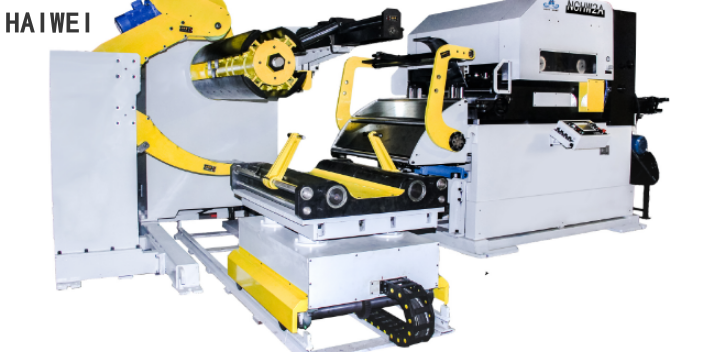
河南新能源汽车冲床送料机方案 诚信服务 东莞市海威智能装备供应