- 产品描述
3D相机照射的原理:一般3D立体相机采用的基本原理是光学三角法:半导体激光器①被镜片②聚焦到被测物体⑥。反射光被镜片③收集,投射到CMOS阵列④上;信号处理器⑤通过三角函数计算阵列④上的光点位置得到距物体的距离。按照测量原理,激光位移传感器分为激光三角测量法和激光回波分析法,激光三角测量法一般适用于高精度、短距离的测量,而激光回波分析法则用于远距离测量,下面分别介绍激光三角测量原理和激光回波分析原理。1.激光位移传感器原理之激光三角测量法原理激光**器通过镜头将可见红色激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机之间的距离,嘉兴点云3D相机参数,嘉兴点云3D相机参数,数字信号处理器就能计算出激光位移传感器和被测物体之间的距离,嘉兴点云3D相机参数。 Gocator优势:国内优越的算法工程师团队,使用我们的GDK工具,根据不同的客户样件,实时优化图像算法。嘉兴点云3D相机参数
3D相机的精度是指什么?跟重复精度有什么区别?线性度的定义?经常听到有人问“.3D相机的精度是指什么?跟重复精度有什么区别?”“3D相机线性度的定义?”等,现在小编带大家一次性搞懂这几个定义!X分辨率=视野宽度/点数●点与点之间沿着激光线方向的水平间距●取决于3D相机沿着视野方向上对应的imager的像素个数对宽度精度很重要Z向线性度以被测输入量处于稳定状态为前提。在规定条件下,3D相机校准曲线与拟合直线间的比较大偏差(ΔZmax)与满量程输出(Z,景深)的百分比,称为线性度。δ=ΔZmax/Z***Z分辨率和重复性分辨率:是指3D相机可感受到的被测量值的由此小变化的能力●稳定的测量环境●标准量块●多次重复测量重复性整个视野量程范围内,测同一物体,多次测量值的变动大小另一种说法叫重复精度,注意区别于精度!重复性的目的只是要获知设备的变异性。精度Precision:仪器的值与理论值之间的比较大差值,由.3D激光视觉传感器的基本误差极限和影响量(如温度变化、湿度变化、电源波动、频率改变等)引起的改变量极限确定。精确度,准确(性);数据稳定性线性度Linearity:是描述.3D相机静态特性的一个重要指标,以被测输入量处于稳定状态为前提。在规定条件下。
成都Gocator24203D相机角度LMI产品**动力电池3D视觉高点赛道。
LMIGocator2400系列**高精度线激光轮廓传感器:产品简介:Gocator2410和2420三维智能传感器是专为微小零部件如消费类电子产品及医疗产品的质量检测而设计。采用优近的两百万像素成像技术以及全新的处理器,可以实现较快速扫描并达到行业内比较高的X方向分辨率和Z方向重复性(μm)。此外,使用蓝色激光意味着在扫描反光物体表面的时候可以获得较清晰可靠的数据。主要特点:*专为微小零部件如消费类电子产品及医疗产品的质量检测而设计*200万像素图像,激光线轮廓点数1940*比较大视野至32mm*比较大测量范围至25mm其他优势:微米级测量搭载两百万像素成像芯片的Gocator2400系列激光传感器可以帮助用户在大范围扫描视野下依然实现微米级的精度。即便是较为微小的缺陷,Gocator2400也依然能够执行**的三维检测。**高检测速度与精度较快的扫描和采集速度能帮助用户实现较高效、较高精度的在线质量检测,同时用户可以较好的设置多重曝光模式来精细的测量同一表面具有不同材质和反射率的目标。X方向高达μm的精度,可以帮助用户在即便非常狭窄的边缘、间隙及断差上依然获得高质量的三维点云数据。
双目立体3D相机介绍:LMI GOCATOR3210传感器类型:三维智能快照式传感器特点:Gocator3210智能传感器专为工业环境下的相关应用需求而设计。简单和灵活多样的设计较大的提高了产品的检测效率进而帮助工厂降低成本和提高生产效率。通过内置于传感器内部的双相机,能够实现各种不同大小、形状复杂物体的完整扫描。内置双相机■高速和低延时■通过网页浏览器进行设置和控制■内置测量工具,*编程■提供完整的开源SDK,可以搭配我司*的软件使用。LMI Gocator 2400和2500系列3D激光传感器。
3D相机线激光传感器技术原理(二):采取三角测量法的激光位移传感器比较高线性度可达1um,分辨率较是可达到。比如ZLDS100类型的传感器,它可以达到,,,适应恶劣环境。激光位移传感器采用回波分析原理来测量距离以达到一定程度的精度。传感器内部是由处理器单元、回波处理单元、激光**器、激光接收器等部分组成。激光位移传感器通过激光**器每秒**一百万个激光脉冲到检测物并返回至接收器,处理器计算激光脉冲遇到检测物并返回至接收器所需的时间,以此计算出距离值,该输出值是将上千次的测量结果进行的平均输出。即所谓的脉冲时间法测量的。激光回波分析法适合于长距离检测,但测量精度相对于激光三角测量法要低,由此远检测距离可达250m。 3D相机的使用和主要功能有哪些?石家庄Gocator26303D相机角度
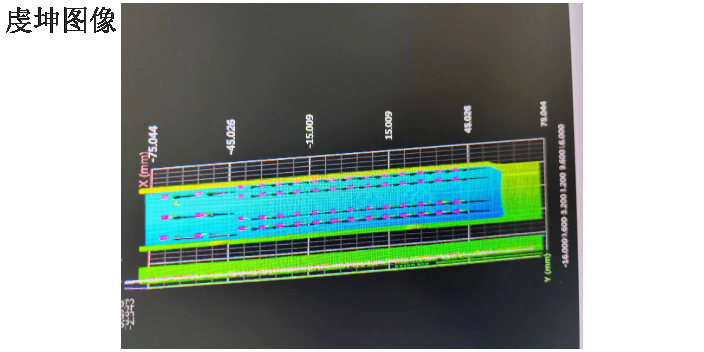
3D视觉方案在汽车车架相对位置检测以及马达密封圈共面度和相对角度检测的应用。嘉兴点云3D相机参数
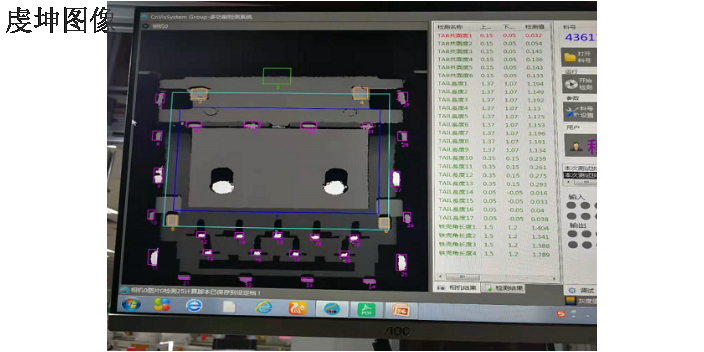
定位常态检测需要用到定位算子,在拍照过程中,产品都会有偏移的情况,就需要定位的算子来修正偏移。常用的定位方式有:点定位和查找模板。1.定位:主要用于产品水平或者垂直方向的偏移,自身不带旋转修正。2.查找模板:主要用于产品有旋转方向的变化,自身包含水平和垂直修正。(查找模板有多种,常用为简单查找模板,其他查找模板为简单查找模板的增强版。)注:在定位算子工作前,需要注册图片来确认模板,后续的定位修正的数值都来自于模板的比对中,注册图片只需在编程时注册一次就可以了,后续发生较大变化时,可以再注册,同样只需注册一次即可,注册时,需要将所有ROI框口重新移位至新的模板图片检测位置,再点击注册,确保检测ROI是根据注册的图片就行定位。 嘉兴点云3D相机参数
苏州虔坤图像技术有限公司致力于电子元器件,以科技创新实现高质量管理的追求。虔坤图像拥有一支经验丰富、技术创新的专业研发团队,以高度的专注和执着为客户提供工业相机,镜头,光源,机器视觉系统集成。虔坤图像始终以本分踏实的精神和必胜的信念,影响并带动团队**成功。虔坤图像始终关注电子元器件行业。满足市场需求,提高产品**,是我们前行的力量。
苏州虔坤图像技术有限公司坐落于上海后花园苏州昆山市,是一家主要以图像视觉技术为主业的公司,公司继承了十几年视觉技术开发应用的的行业技术经验,主要业务包含机器视觉主要部件的代理销售,囊括国内外主要品牌的硬件销售,主要有BASLER、HIKVISION、大华、映美精、LMI(加拿大3D相机)等品牌相机,MORITEX、computar、视清、灿锐等品牌镜头,汇林、嘉励、纬朗等品牌光源。公司基本的竞争力是视觉软件的开发应用,主要优势是2D+3D的机器视觉应用。公司致力于机器视觉行业发展兴盛,承接各类非标机器视觉检测设备,主要行业有3C电子产品尺寸检测,3D共面度检测,连接器PIN针高低差检测,汽车行业保险丝检测,光伏行业鼓簧组装检测等,承接各行业机器视觉系统集成方案和外包服务。感谢客户的支持和订购,我们将把品质和服务做好,以低廉的价格回报客户。
欢迎来到苏州虔坤图像技术有限公司网站,我公司位于园林景观其独特,拥有 “中国园林之城”美称的苏州市。 具体地址是江苏苏州昆山市公司街道地址,负责人是谭建文。
主要经营工业相机|镜头|光源|机器视觉系统集成。
单位注册资金:人民币 30 万元 - 50 万元。
本公司主营:工业相机|镜头|光源|机器视觉系统集成等产品,是优秀的电子产品公司,拥有最优秀的高中层管理队伍,他们在技术开发、市场营销、金融财务分析等方面拥有丰富的管理经验,选择我们,值得你信赖!
本页链接:http://www.cg160.cn/vgy-102173246.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 我要给“嘉兴点云3D相机参数 欢迎来电 苏州虔坤图像技术供应”留言
- 更多产品


















