


- 产品描述
适用范围:
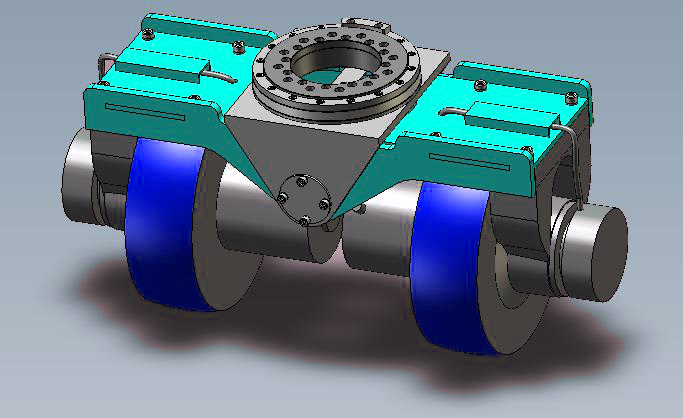
AGV搬运车、AGV牵引车、AGV叉车;
行走机构技术参数:
电机额定功率:1500W(三相异步交流电机);
电池电压:24V/48V;
额定电流:76A;
额定转速:2590r/min;
额定扭矩:5.5Nm;
编码器脉冲:32/48/64;
传动比:1:20.07;
轮径:230mm;
轮宽:75mm;
额定载荷:1300KG;
行走速度:73m/min。
转向机构技术参数:
电机额定功率:200W(直流永磁有刷电机);
定制类型:直流永磁无刷电机(200W-400W)、直流伺服电机(200W-400W);
额定电压:24V;
额定电流:13A;
额定转速:3000r/min;
减速比:1:31.5;
编码器脉冲:1024/256/。
国产核心驱动轮的崛起
国产驱动轮在国产核心供应链的地位仅次于导航控制。随着国产AGV轮企业的百花齐放,国产AGV在降本增效上随之也取得了相当程度的进展。
过去,市面上主要采用平行轴结构方式的差速轮型驱动,但是平行轴结构的体积较大,而且精度不够,后来逐渐被行星结构代替;而舵轮的发展更是百花齐放,市面上目前已经出现行星、摆线、少齿差、平行轴等几种结构方式,并成为主流。
AGV从发明至今已经有60年的历史,随着应用领域的扩展,其种类和形式变得多种多样。常常根据AGV自动行驶过程中的导航方式将AGV分为以下几种类型:
1.电磁感应引导式AGV
电磁感应式引导一般是在地面上,沿预先设定的行驶路径埋设电线,当高频电流流经导线时,导线周围产生电磁场,AGV上左右对称安装有两个电磁感应器,它们所接收的电磁信号的强度差异可以反映AGV偏离路径的程度。AGV的自动控制系统根据这种偏差来控制车辆的转向,连续的动态闭环控制能够保证AGV对设定路径的稳定自动跟踪。这种电磁感应引导式导航方法在绝大多数商业化的AGVS上使用,尤其是适用于大中型的AGV。
2.激光引导式AGV
该种AGV上安装有可旋转的激光扫描器,在运行路径沿途的墙壁或支柱上安装有高反光性反射板的激光定位标志,AGV依靠激光扫描器发射激光束,然后接受由四周定位标志反射回的激光束,车载计算机计算出车辆当前的位置以及运动的方向,通过和内置的数字地图进行对比来校正方位,从而实现自动搬运。
该种AGV的应用越来越普遍。并且依据同样的引导原理,若将激光扫描器更换为红外发射器、或超声波发射器,则激光引导式AGV可以变为红外引导式AGV和超声波引导式AGV。
3. 视觉引导式AGV
视觉引导式AGV是正在快速发展和成熟的AGV,该种AGV上装有CCD摄像机和传感器,在车载计算机中设置有AGV欲行驶路径周围环境图像数据库。AGV行驶过程中,摄像机动态获取车辆周围环境图像信息并与图像数据库进行比较,从而确定当前位置并对下一步行驶做出决策。
这种AGV由于不要求人为设置任何物理路径,因此在理论上具有的引导柔性,随着计算机图像采集、储存和处理技术的飞速发展,该种AGV的实用性越来越强。
此外,还有铁磁陀螺惯性引导式AGV、光学引导式AGV等多种形式的AGV。
agv小车指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源,一般可通过电脑来控制其行进路线以及行为。
agv小车底部通过驱动轮控制agv小车的移动,现有的agv小车驱动轮通过螺栓与agv小车底板进行锁固,但未对驱动轮的平行效果进行保证,容易导致前后两侧的驱动轮产生平行偏差,影响agv小车驱动轮的驱动轨迹。


上海玺梓精密机械设备有限公司,致力于开发研究精密凸轮、凸轮分割器和闽台精锐减速机,公司拥有国内较**的加工设备、加工工艺、检测手段,并与高等院校合作,吸收国外**技术、经验,加工出的凸轮精度高,寿命长,定位准确,受到用户的普遍**。 “玺梓”分割器产品具有步进定位精度高,高速运转平稳,传动扭矩大,定位时自锁等显着优点,是替代槽轮机构,不完全齿轮机构,棘轮机构等传统间歇机构的较理想产品。 出色的产品质量,完善的售后服务和优惠的销售价格,为我公司带来了庞大的客户群和良好的声誉!公司本着顾客至上,服务至诚之精神,凝聚了一个较富行业经验的技术团队,为用户提供理想的产品和满意的服务!
欢迎来到上海玺梓精密机械设备有限公司网站,我公司位于历史文化悠久,近代城市文化底蕴深厚,历史古迹众多,有“东方巴黎”美称的上海市。 具体地址是上海青浦公司街道地址,负责人是陶念源。
主要经营相关产品。
本页链接:http://www.cg160.cn/vgy-101661479.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
关于上海玺梓精密机械设备有限公司
商铺首页 |
更多产品 |
联系方式
上海玺梓精密机械设备有限公司,致力于开发研究精密凸轮、凸轮分割器和闽台精锐减速机,公司拥有国内较**的加工设备、加工工艺、检测手段,并与高等院校合作,吸收国外**技术、经验,加工出的凸轮精度高,寿命长,定位准确,受到用户的普遍**。 “玺梓”分割器产品具有步进定位精度高,高速运转平稳,传动扭矩大,定位时自..
- 我要给“agv小车减速机 河南AGV小车舵轮代理”留言
- 更多产品











相关分类






