
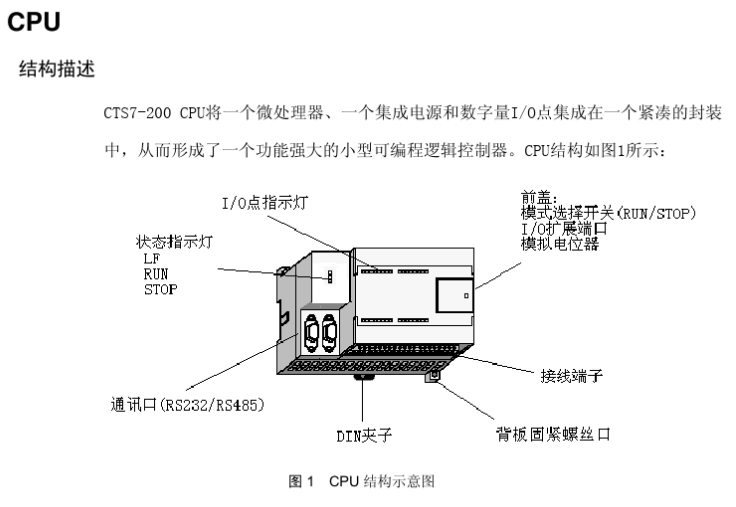
- 产品描述
SIEMENS浔之漫智控技术有限公司威海西门子网线6XV1840-2AH10
OB的作用如下:
OB1(Free Cycle)顺序扫描
OB10~OB17(Time-Of-Day Interrupt)时间-日期中断
OB20~OB23(Time-Delay Interrupt)时间延迟中断
OB30~OB38(Cyclic Interrupt)周期性中断
OB40~OB47(Hardware Interrupt)硬件中断
OB55(Status Interrupt)状态中断
OB56(Update Interrupt)升级中断
OB57 (Manufacturer Interrupt)厂商**中断
OB61~OB64(Synchronous Cycle Interrupt)异步周期中断
OB70(I/O Redundancy Error)I/O冗余错误
OB72(CPU Redundancy Error)CPU冗余错误
OB73(Communication Error)通信错误
OB80(Time Error)时间错误
OB81(Power Supply Error)电源错误
OB82 (Diagnostic Interrupt)诊断中断
OB83(Insert/Remove Interrupt)插/拔中断
OB84(CPU Hardware Fault)CPU硬件错误
OB85(Priority Class Error)**级错误
OB86(Rack Failure)机架错误
OB87(Communication Error)通信错误
OB88 (Processing Interrupt)过程错误
OB90(Background OB)背景OB
OB100(Warm Restart)暖启动
OB101(Hot Restart)热启动
OB102(Cold Restart冷启动
OB121(Programming Error)编程错误
OB122(I/O Access Error)I/O存储错误
注:OB55,OB56,OB57,OB61,OB62,OB63,OB64,OB81,OB84,OB87,OB88,OB90是NOP(空操作)用户不需要用户不需要修改调用空操作的程序PLC 控制系统中S7-1500产品主要特点
西子公司新一代S7-1500集成了运动控制、工业信息安全和故障安全功能, 强大的CPU模块功能可供用户使用充足的资源。
从硬件方便说S7-1500PLC的处理速度较快,联网能力较强,诊断能力和安全性较高,不仅可节省成本,提高生产效率,而且,维护简单方便,真正成为工厂客户和现场维护人员的控制器。
S7-1500PLC的组态和编程效率较高,信息和查看较方便,这也是工程设计人员的福音。由于S7-1500PLC是无缝集成到TIA博途软件中,无论是硬件组态、网络连接和上位组态,还是软件编程,其操作均简单快捷。
系统网络结构
总控系统控制器采用西门子S7-1500PLC作为主控制器,西门子HMI操作面板、拧紧通过PROFINET总线与喷涂机器人系统通讯,完成系统整体控制,实现对系统运行状态的实时监控及操作,保证对整个工件的连续操作。
图为:网络布置图
S7-1500通过PROFINET通讯控制机器人
该项目机器人为6轴关节式机器人。以西门子PLC为**,控制柜设计了PROFINET通讯系统在该系统中,采用西门子S7-1500PLC作为主站,控制柜作为从站用来控制机械臂的运动和状态。控制柜通过KLI接口与交换机相连接,系统总线采用RJ45插头的双绞线。系统工作时,上级控制器S7-1500PLC通过外部自动运行接口向机器人控制系统发送机器人进程的相关信息:运行,故障确认,程序启动等。机器人控制系统向上级控制器S7-1500PLC发送运行状态与故障状态的相关信息。HMI作为组态和监控的控制器对控制柜的PROFINET选项进行配置,并对PLC进行项目组态和运行状态的监控。
基于PROFINET通讯协议的系统解决方案可以实现机器人、气缸动作、以及触摸屏与S7-1500PLC的通讯,其通讯速度快,抗*力强,信号十分稳定。通讯连接简单,不需要安装通讯模块,减少了硬件的配置,并且很好的解决了在实际工程中经常出现的慢、经常断网的问题,优化了生产线的通讯结构,提高了生产的稳定性和生产效率
拟量的正反转控制和死区功能
在用模拟量控制正反转时,零界点即0v时应该为0hz,但实际上真正的0hz很难做到,且频率值很不稳定,在频率0hz附近时,常常出现正转命令和反转命令共存的现象,并呈“反反复复”状。为了克服这个问题,预防反复切换现象,就定义在零速附近为死区。
对于死区,不同类型的变频器定义都会有所不同。一般有以下两种:
(1)线段型。如图中所示,如定义(-1v,+1v)为死区,则模拟量信号在(-1v,+1v)范围时按零输入处理,(+1v,+10v)对应(0hz,较大频率),(-1v,-10v)对应(0hz,负的较大频率)。(2)滞环回线型。在变频器的输出频率定义一个频率死区(-fdead,+fdead),这样一来配合着电压死区(-udead,+udead)就围成了滞环回线。
模拟量的正反转控制功能还有一种就是在模拟量非双极性功能的情况下(也就是说电压不为负的单极性模拟量)也可以实现,即定义在给定信号中间的任意值作为正转和反转的零界点(相当于原点),**原点以上的为正转,**原点以下的为反转。同理,也可以相应设置死区功能,实现死区跳跃。但是,在这种情况下,却存在一个特殊的问题,即万一给定信号因电路接触问题或其他原因而丢失,则变频器的输入端得到的信号为0v,其输出频率将跳变为反转的较大频率,电动机将从正常工作状态转入高速反转状态。十分明显,在生产过程中,这种情况的出现将是十分有害的,甚至有可能损坏生产机械。对此,变频器设置了一个有效的“零”功能。就是说,让变频器的实际较小给定信号不等于0,而当给定信号等于0时,变频器的输出频率则自动降至0速。
5脉冲给定
脉冲给定方式即通过变频器的特定的高速开关端子从外部输入脉冲序列信号进行频率给定,并通过调节脉冲频率来改变变频器的输出频率。
不同的变频器对于脉冲序列输入都有不同的定义,以安川vs g7为例:脉冲频率为0~32kkhz,低电平电压为0.0~0.8v,高电平电压为3.5~13.2v,占空比为30%~70%。
这里进行举例说明一下脉冲给定的参数设置。现在有一个变频系统,其需求如下:
(1)使用端子输入的脉冲信号来设置给定频率;
(2)输入信号范围为1khz~20khz;
(3)要求1 khz输入信号对应设定频率为50hz,20khz输入信号对应设定频率为5hz。
根据上述要求,参数设置要点如下:
(1)设置频率给定方式为脉冲给定;
(2)选择多功能输入端子为脉冲信号输入(如脉冲信号端子固定则*选择,如安川vs g7的rp端子);
(3)设置脉冲较大输入频率为20khz;
(4)定义频率给定曲线首坐标点的数值,即较小脉冲给定值的百分比为1 khz÷20 khz×100%=5%,以及较小脉冲数对应的频率值50hz;
(5)定义频率给定曲线尾坐标点的数值,即较大脉冲给定值的百分比为100%,以及较大脉冲数对应的频率值5hz。6通讯给定
6.1 基本概念
通讯给定方式就是指上位机通过通讯口按照特定的通讯协议、特定的通讯介质进行到变频器以改变变频器设定频率的方式。
上位机一般指计算机(或工控机)、plc、dcs、人机界面等主控制设备。
上位机和变频器之间传输数据的方式主要有两种:
(1)串行方式。它每次只传送二进制的一位,主要优点是连线少,一般只有2根或3根,缺点是传送速度较低;
(2)并行方式。它每次可传送一个完整的字符,传送速度快,但所需的连线较多,一般需要8根或16根,成本相应就高了许多。由于上位机与变频器之间的距离一般不会太远,对传输速度的要求也不是很高,因此在通常情况下都采用串行传输方式。
上位机和变频器之间进行通讯的主要方式也有两种:
(1)异步方式。每个字符前有一个起始位,表示该字符已经开始;当完毕后,设置一个奇偶校验位进行奇偶校验;最后,又设置一个停止位,表示该字符已经结束。异步传输的优点是灵活性好,便于处理实时性较强的串行数据;缺点是传输速度较低。
(2)同步方式。它可以同时传输一个包含许多个字符的“数据块”,只需在每个数据块设置通讯双方共同规定的同步符号“syn字符1”和“syn字符2”即可。同步方式的优点是不必要在每个字符的前后设置标志符号(起始位和停止位),从而节省了时间,提高了传输速度;缺点是必须采用同步脉冲来协调,从而灵活性较差。上位机和变频器之间的传递方法也有两种:
(1)全双工方式。数据在上位机和变频器之间的发送和接收可以同时进行。
(2)半双工方式。每台设备都只能做一件事情,或接收,或发送,而不能同时发送或接收。每次发送或接收时,都需要进行发送和接收之间的换向。
上位机和变频器之间的传输速度通常用“波特率”来表示,其定义如下:每秒钟传送二进制位的位数,单位是bit/s。6.2通讯参数设置
只有设置正确的通讯参数才能确保上位机和变频器之间的通讯正常,也才能保证通讯给定方式的准确性。通讯参数一般包含以下几个主要内容:
(1)波特率选择。一般的变频器通讯波特率可以选择300bps、600bps、1200bps、2400bps、4800bps、9600bps、19200bps、38400bps等。
(2)数据格式。常见的数据位包括一个起始位、八个数据位、一个停止位,校验位则可以分别设置位奇校验、偶校验和无校验三种。
(3)接线方式。包括直接电缆连接rs-232/rs-485和调制解调器modem(rs-232),其中设置为调制解调器modem(rs-232)时,每当变频器上电时,将通过变频器的通讯口(rs-232)对调制解调器modem做一次初始化操作,以便调制解调器在接收到电话线路3次振铃后自动响应,实现由拨号线路组成的远程控制线路。
(4)通讯地址。用来标志变频器本体的地址,其中有一个为广播地址,可以接受和执行上位机的广播命令,而不会应答上位机。
(5)通讯**时检出时间。当通讯口信号消失后,其持续时间**过通讯**时设置后,变频器即判断为通讯故障。
(6)变频器应答延时。它指变频器通讯口在接收并解释执行上位机发送过来的命令后,直到返回应答帧给上位机所需要的延迟时间。6.3通讯故障及处理
通讯**时故障检出后,变频器将按照预先设置的动作模式进行操作。常见的动作模式有故障跳闸并停机、报警并维持现有频率运行、报警并按限定频率运行。7给定方式的叠加
7.1 基本概念
给定方式的叠加是指在主给定通道频率的基础上再加上辅助给定通道频率作为变频器的设定频率。其叠加方式不是简单的加法运算,还可以融合多种叠加运算公式。
7.2叠加运算公式
不同给定方式的叠加是指在主给定通道频率的基础上再加上辅助给定通道频率作为变频器设定频率。8 给定方式的切换
给定方式的切换是指通过多功能端子的不同组合来实现不同给定方式之间的切换。在下面的列表1显示中,通过多功能输入端子x1、多功能输入端子x2、多功能输入端子x3,不同的输入状态可以实现较多达7种给定方式之间的切换(on表示信号接通、off表示信号断开)。
本公司长期销售大量*西门子.保证原装**工厂直销.售后有保证本公司可签订:原装**- -罚十
本公司库存优势产品:西门子SMART200、ET200、S7-200、 S7-200CN、 S7 -300、S7. -400、S7-1200S7-1500PLC、 6XV触摸屏、 6EP电
源、DP电缆、接头、网线、6FC、6SN、 S120、 V20、 V90、G110、 G120、 G120X. 6RA、6GK、6GT、 低压系列、软启动器、伺服数控
备件、NCU. MM420、MM430、MM440系列、 LOGO系列,欢迎选购!
欢迎来到浔之漫智控技术(上海)有限公司网站,我公司位于历史文化悠久,近代城市文化底蕴深厚,历史古迹众多,有“东方巴黎”美称的上海市。 具体地址是上海松江公司街道地址,联系人是聂经理。
主要经营浔之漫智控技术(上海)有限公司主要经营:西门子PLC代理商、西门子PLC模块代理商、西门子中国一级代理商、西门子低压电器总代理商、西门子DP通讯电缆代理商、西门子中国总代理商等;欢迎大家来电咨询。。
本公司主营:浔之漫智控技术(上海)有限公司主要经营:西门子PLC代理商、西门子PLC模块代理商、西门子中国一级代理商、西门子低压电器总代理商、西门子DP通讯电缆代理商、西门子中国总代理商等;欢迎大家来电咨询。等产品,是优秀的电子产品公司,拥有最优秀的高中层管理队伍,他们在技术开发、市场营销、金融财务分析等方面拥有丰富的管理经验,选择我们,值得你信赖!
本页链接:http://www.cg160.cn/vgy-100652516.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
本公司长期销售大量*西门子.保证原装**工厂直销.售后有保证本公司可签订:原装**- -罚十
本公司库存优势产品:西门子SMART200、ET200、S7-200、 S7-200CN、 S7 -300、S7. -400、S7-1200S7-1500PLC、 6XV触摸屏、 6EP电
源、DP电缆、接头、网线、6FC、6SN、 S120、 V20、 V90、G110、..
- 我要给“威海西门子网线6XV1840-2AH10”留言
- 更多产品
















