- 阿德采购网
> 供应信息
> 工控电器网
> DCS/PLC系统网
> 海南西门子PLC代理商

- 产品描述
西门子S7-200 plc的用户程序结构可分为两种:线性程序结构和分块程序结构。浔之漫智控技术有限公司 长期低价销售西门子PLC,200,300,400,1200,西门子PLC附件,西门子电机,西门子人机界面,西门子变频器,西门子数控伺服,西门子总线电缆现货供应,欢迎来电咨询系列产品,折扣低,货期准时,并且备有大量库存.长期有效
1.线性程序结构
线性程序结构是指一个工程的全部控制任务被分成若千个小的程序段,按照控制的顺序依次排放在主程序中,如图3-1所示。编程时,用程序控制指令将各个小的程序段依次链接起来;程序执行过程中,不断扫描主程序,按照编写好的指令代码顺序地执行控制工作。
线性程序结构简单明了,但是仅适合控制量比较小的场合。控制任务越大,线性程序的结构就越复杂,执行效率就越低,系统越不稳定。
2.分块程序结构
分块程序结构是指一个工程的全部控制任务被分成多个任务模块,每个模块的控制任务由子程序或中断程序完成。编程时,主程序和子程序(或中断程序〉分开独立编写;在程序执行过程中,不断扫描主程序,碰到子程序调用指令就转移到相应的子程序中去执行,如图3-2所示,遇到中断请求就调用相应的中断程序。分块程序结构虽然复杂一点,但是可以把一个复杂的控制任务分解成多个简单的控制任务。分块程序有利于代码编写,而且程序调试也比较简单。所以,对于一些相对复杂的工程控制,建议使用分块程序结构。
1)按I/O点数分类
PLC所能接受的输入信号个数和输出信号个数分别称为PLC的输入点数和 输出点数。其输入、输出点数的数目之和称为PLC的输入/输出点数,简称I/O点数。I/O点数是选择PLC的重要依据之一。
一般而言,PLC控制系统处理的I/O点数较多时,则控制关系比较复杂,用户要求的程序存储器容量也较大,要求PLC指令及其他功能比较多。按PLC输入、输出点数的多少可将PLC分为以下三类。
(1)小型机
小型PLC输入、输出总点数一般在256点以下,用户程序存储器容量在4K字左右。小型PLC的功能一般以开关量控制为主,适合单机控制和小型控制系统。
(2)中型机
中型PLC的输入、输出总点数在256~2048点之间,用户程序存储器容量达到8K字左右。中型机适用于组成多机系统和大型控制系统。
(3) 大型机
大型PLC的输入、输出总点数载2084点以上,用户程序存储器容量达到16K字以上。大型机适用于组成分布式控制系统和整个工厂的集散控制网络。
上述划分没有一个十分严格的界限,随着PLC技术的飞速发展,一些小型PLC也具备中型或大型PLC的功能,这也是PLC的发展趋势。
2)按结构形式分类
按照PLC的结构特点可分为整体式、模块式两大类。
(1)整体式结构
把PLC的CPU、存储器、输入/输出单元、电源等集成在一个基本单元中,其结构经凑,体积小,,安装方便。基本单元上设有扩展端口,通过电缆与扩展单元相连,可配接特殊功能模块。微型和小型PLC一般为整体式结构,S7-200系列属整体式结构。
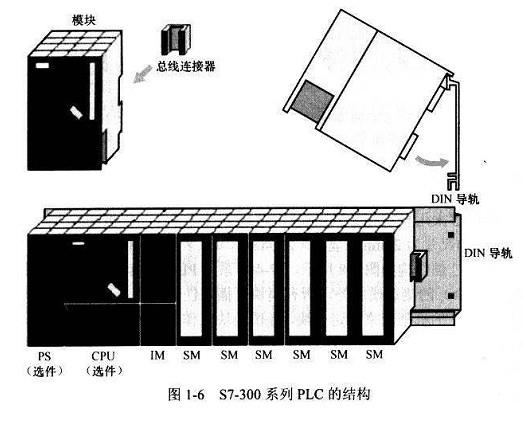
(2)模块式结构
模块式结构的PLC由一些模块单元构成,这些标准模块包括CPU模块、输入模块、输出模块、电源模块和各种特殊功能模块等,使用时将这些模块插在标准机架内即可。各模块功能是独立的,外形尺寸是统一的。模块式PLC的硬件组态方便灵活,装配和维修方便,易于扩展。
目前,中、大型PLC多采用模块式结构形式,如西门子的S7-300和S7-400系列。
下面从7个方面对PLC与计算机的性能和价格进行相比较:
① 应用范围:微机除了用在控制领域外,还大量用于科学计算、数据处理、计算机通信等方面。而PLC主要用于工业控制。
② 使用环境:微机对环境要求较高,一般要在干扰小、具有一定的温度和湿度要求的机房内使用。而PLC适应于工程现场的环境。
③ 输入输出:微机系统的I/O设备与主机之间采用微电联系,一般不需要电气隔离。而PLC一般控制强电设备,需要电气隔离,输入输出均用“光–电”耦合,输出还采用继电器,可控硅或大功率晶体管进行功率放大。
④ 程序设计:微机具有丰富的程序设计语言,例如汇编语言,FORTRAN语言、COBOL语言、PASCAL语言、C语言等,其语句多,语法关系复杂,要求使用者必须具有一定水平的计算机硬件和软件知识。而PLC提供给用户的编程语句数量少,逻辑简单,易于学习和掌握。
⑤ 系统功能:微机系统一般配有较强的系统软件,例如操作系统,能进行设备管理、文件管理、存储器管理等。它还配有许多应用软件,以方便用户。而PLC一般只有简单的监控程序,能完成故障检查、用户程序的输入和修改、用户程序的执行与监视等功能。
⑥ 运算速度和存储容量:微机运算速度快,一般为微秒级。因有大量的系统软件和应用软件,故存储容量大。而PLC因接口的响应速度慢而影响数据处理速度。一般接口响应速度为2 ms,PLC巡回速度为每千字8 ms。PLC的指令少,编程也简短,故内存容量小。
⑦ 价格:微机是通用机,功能完善,故价格较高。而PLC是**机,功能较少,其价格是微机的十分之一左右。
plc模拟量**问题就是物理量程对应信号量程(比如0~10V,或4~20ma),信号量程对应A/D转换的整数范围,A/D转换的整数值西门子S7-200是0~32000,对西门子S7-300/400是0~27648。
1、西门子S7-300/400可以用FC105/FC106处理模拟(SCALE/UNSCALE)
2、西门子S7-200用AIW 、AQW输入、输出模拟量,S7-200会自动将输入的模拟量转换为0~32000的整数,程序编写时通过AIW将转换后的0~32000的整数读进程序,通过你的计算,然后通过AQW输出即可,CPU会自动的D/A转换的。西门子S7-200PLC模拟量编程的思维是什么?
简而言之,模拟量输入就是将模拟量传感器、变送器的电量信号通过模拟量输入模板输入到PLC中,并应用程序进行转换为数值。而模拟量输出就是应用程序将数值通过模拟量输出模板输出到相应的外部设备中。*的知识点:
a、首先要熟悉S7-200PLC模拟量输入、输出模块的硬件特性。
b、要熟悉S7-200PLC模拟量输入、输出模块的接线方法;
c、要熟悉S7-200PLC模拟量输入、输出模块的方式设置;
d、要熟悉模数、数模转换的方法;
e、要熟悉S7-200PLC相关的编程指令;
f、要熟悉你应用的模拟量传感器、变送器的电气特性及接线方法。
1、概述
S7-200 有两个 置PTO/PWM 发生器,用以建立高速脉冲串(PTO)或脉宽调节(PWM) 信号波形。
当组态一个输出为PTO 操作时,生成一个50%占空比脉冲串用于步进电机或伺服电机的速度和位置的开环控制。置PTO功能提供了脉冲串输出,脉冲周期和数量可由用户控制。但应用程序必须通过plc内置I/O 提供方向和限位控制。
为了简化用户应用程序中位控功能的使用,STEP7--Micro/WIN 提供的位控向导可以帮助您在几分钟内全部完成PWM,PTO或位控模块的组态。向导可以生成位置指令,用户可以用这些指令在其应用程序中为速度和位置提供动态控制。
2、开环位控用于步进电机或伺服电机的基本信息
借助位控向导组态PTO 输出时,需要用户提供一些基本信息,逐项介绍如下:
⑴ 大速度 (MAX_SPEED)和启动/停止速度 (SS_SPEED)
图1是这2 个概念的示意图。
MAX_SPEED是允许的操作速度的大值,它应在电机力矩能力的范围。驱动负载所需的力矩由摩擦力、惯性以及加速/减速时间决定。
图1 大速度和启动/停止速度示意
SS_SPEED:该数值应满足电机在低速时驱动负载的能力,如果SS_SPEED的数值过低,电机和负载在运动的开始和结束时可能会摇摆或颤动。如果SS_SPEED的数值过高,电机会在启动时丢失脉冲,并且负载在试图停止时会使电机速。通常,SS_SPEED 值是MAX_SPEED 值的5%至15%。
⑵加速和减速时间
加速时间ACCEL_TIME:电机从SS_SPEED速度加速到MAX_SPEED速度所需的时间。
减速时间DECEL_TIME:电机从MAX_SPEED速度减速到SS_SPEED速度所需要的时间。
图2 加速和减速时间
加速时间和减速时间的缺省设置都是1000毫秒。通常电机可在小于1000 毫秒的时间工作。参见图2。这2个值设定时要以毫秒为单位。
注意:电机的加速和失速时间要过测试来确定。开始时,您应输入一个较大的值。逐渐减少这个时间值直至电机开始失速,从而优化您应用中的这些设置。
⑶移动包络
一个包络是一个预先定义的移动描述,它包括一个或多个速度,影响着从起点到终点的移动。一个包络由多段组成,每段包含一个达到目标速度的加速/减程和以目标速度匀速运行的一串固定数量的脉冲。位控向导提供移动包络定义界面,在这里,您可以为您的应用程序定义每一个移动包络。PTO 支持大100 个包络。
定义一个包络,包括如下几点:①选择操作模式;②为包络的各步定义指标。③为包络定义一个符号名。
⑴选择包络的操作模式:
PTO支持相对位置和单一速度的续转动,如图3所示,相对位置模式指的是运动的终点位置是从起点侧开始计算的脉冲数量。单速续转动则不需要提供终点位置,PTO一直持续输出脉冲,直至有其他命令发出,例如到达原点要求停发脉冲。
图3 一个包络的操作模式
⑵包络中的步
一个步是工件运动的一个固定距离,包括加速和减速时间 的距离。PTO 每一包络大允许29 个步。
每一步包括目标速度和结束位置或脉冲数目等几个指标。图4 所示为一步、两步、三步和四步包络。注意一步包络只有一个常速段,两步包络有两个常速段,依次类推。步的数目与包络中常速段的数目一致。
图4 包络的步数示意
3、使用位控向导编程
STEP7 V4.0 软件的位控向导能自动处理PTO脉冲的单段管线和多段管线、脉宽调
制、SM 位置配置和创建包络表。
本节将给出一个在YL-335A 上实现的简单工作任务例子,阐述使用位控向导编程的方法和步骤。表1 是YL-335A 上实现步进电机运行所需的运动包络。
表1 步进电机运行的运动包络
1、使用位控向导编程的步骤如下:
1)为S7--200 PLC选择选项组态 置PTO/PWM操作。
在STEP7 V4.0软件命令菜单中选择工具→位置控制向导并选择配置S7-200PLC内
置PTO/PWM操作,如图5所示。
6ES72111BE400XB0 CPU 1211C AC/DC/Rly,6输入/4输出,集成2AI 6ES72111AE400XB0 CPU 1211C DC/DC/DC,6输入/4输出,集成2AI 6ES72111HE400XB0 CPU 1211C DC/DC/Rly,6输入/4输出,集成2AI 6ES72121BE400XB0 CPU 1212C AC/DC/Rly,8输入/6输出,集成2AI 6ES72121AE400XB0 CPU 1212C DC/DC/DC,8输入/6输出,集成2AI 6ES72121HE400XB0 CPU 1212C DC/DC/Rly,8输入/6输出,集成2AI 6ES72141BG400XB0 CPU 1214C AC/DC/Rly,14输入/10输出,集成2AI 6ES72141AG400XB0 CPU 1214C DC/DC/DC,14输入/10输出,集成2AI 6ES72141HG400XB0 CPU 1214C DC/DC/Rly,14输入/10输出,集成2AI 6ES72151BG400XB0 CPU 1215C AC/DC/Rly,14输入/10输出,集成2AI/2AO 6ES72151AG400XB0 CPU 1215C DC/DC/DC,14输入/10输出,集成2AI/2AO 6ES72151HG400XB0 CPU 1215C DC/DC/Rly,14输入/10输出,集成2AI/2AO 6ES72171AG400XB0 CPU 1217C DC/DC/DC,14输入/10输出,集成2AI/2AO



)是专业从事西门子工业自动化产品销售和系统集成的**企业。在西门子工控领域,公司以精益求精的经营理念,从产品、方案到服务,致力于塑造一个“行业*”,以实现可持续的发展。
多年以来,公司坚持“以客户为本,与客户共同发展”的思想,全力以赴为工矿用户、设计单位、工程公司提供高性价比、高稳定性、高可靠性的整体解决方案。
“我们不仅仅销售优质的产品”是公司每个员工的工作信条,在为客户提供产品和方案的过程中,我们愿意倾听客户,和客户共同完善,不断提高服务质量,追赶客户的期望。以此为基础,我们追求客户、厂商和员工三方的共赢。
本公司与德国SIEMENS公司自动化与驱动部门的长期紧密合作过程中,建立了良好的相互协作关系,在自动化产品与驱动产品业务逐年成倍增长,为广大用户提供了SIEMENS的较新的技术及自动控制的较佳解决方案。
从事工业自动化科技领域内的技术开发、技术咨询、技术服务,气动元件,电机配件,水处理设备,电力设备,电子元器件,仪器仪表,仪器设备,传感器,电机,电控设备,五金机电,工业自动化控制设备,家用电器,工具刃具,电线电缆,机械设备及配件,电器成套设备销售
本店是实体公司,专业销售工业自动化产品,本店销售的产品均是全新**, 本店可签订正式的销售合同,并可开具17%的增值税,税点另算。
欢迎来到浔之漫智控技术(上海)有限公司网站,我公司位于历史文化悠久,近代城市文化底蕴深厚,历史古迹众多,有“东方巴黎”美称的上海市。 具体地址是上海松江公司街道地址,联系人是刘经理。
主要经营浔之漫智控技术(上海)有限公司是一家西门子plc代理商和西门子代理商,西门子价格每年都在变,2019年西门子plc模块报价单,现在价格是一落千丈,其实大多数经销商可以在今年多备货,因为以后估计要涨价,所以趁着今年的大降价,咱们来一批备货吧! 。
单位注册资金:人民币 10 万元以下。
价格战,是很多行业都有过的恶性竞争,不少厂家为了在价格战役中获胜,不惜以牺牲产品质量为代价,而我们公司坚决杜绝价格战,坚持用最优的原材料及最先进的技术确保产品质量,确保消费者的合法利益。
本页链接:http://www.cg160.cn/vgy-99764322.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- JNRLH1/LBY-135/30 超耐热铝合金绞线电话 倍容量导线 MHYV32矿用通信电缆 杭州矿用通信电缆厂家 抗拉 耐磨 北京弧光保护VAM10LSE 杭州弧光保护vamp系列 厂家了解 武汉通信电缆厂家 hya通信电缆价格 量大优惠 盐城超五类生产厂家 数据中控光纤线缆 母线槽哪家 西宁通信电缆 铠装通信电缆电缆 导电性能优良 MHYV矿用信号电缆 山西矿用通信电缆 防火阻燃 JNRLH1/LBY-240/55 百色超耐热铝合金绞线厂家 超耐热 北京配电母线排厂家代理|五芯 MHYA32矿用通信电缆 河北矿用通信电缆厂家 传输能力强 西安通信电缆厂家 HYA通信电缆厂家 耐腐蚀 耐高温
)是专业从事西门子工业自动化产品销售和系统集成的**企业..
- 我要给“海南西门子PLC代理商”留言
- 更多产品


















