- 阿德采购网
> 供应信息
> 工控电器网
> DCS/PLC系统网
> 潮州西门子PLC代理商

- 产品描述
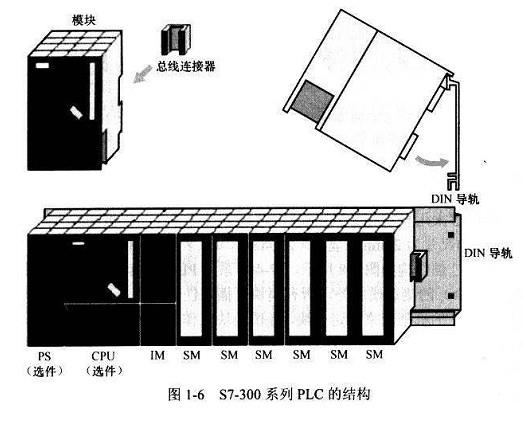
S7—300是模块化的组合结构,根据应用对象的不同,可选用不同型号和不同数量的模块。并可以将这些模块安装在同一机架(导轨)或多个机架上。与CPU312IFM和CPU313配套的模块只能装在一个机架上。除了电源模块、CPU模块和接口模块外,一个机架上多只能在安装八个信号模块或功能模块。浔之漫智控技术有限公司 长期低价销售西门子PLC,200,300,400,1200,西门子PLC附件,西门子电机,西门子人机界面,西门子变频器,西门子数控伺服,西门子总线电缆现货供应,欢迎来电咨询系列产品,折扣低,货期准时,并且备有大量库存.长期有效
CPU314/315/315-2DP多可扩展为四个机架,IM360/IM361接口模块将S7—300 背板总线从一个机架连接到下一个机架,如图2.3所示。
*处理单元总是在0号机架的2号槽位上,1号槽安装电源模块,3号槽总是安装接口模块。槽号4至11,可自由分配信号模块、功能模块和通信模块。需要注意的是,槽位号是相对的,每一机架的导轨并不存在物理的槽位。
用于发送的接口模块IM360,装在0号机架3号槽。通过**电缆,将数据从IM360发送到IM361。IM360 和IM361的大距离为10m.IM361上有指示系统状态和故障的发光二管LED,如果CPU不确认此机架,则LED闪烁,可能是连接电缆没接好或者是串行连接的IM361关掉了。具有接受功能的接口模块IM361,用于S7—300 的机架1到机架3的扩展,通过连接电缆把数据从IM360接收到IM361或者从一个IM361传到另一个IM361。IM361 和IM361之间的大距离也为10m。IM361不仅提供数据传输功能,还将24V直流电压转换为5V直流电压,给所在机架的背板总线提供直流5V电源,供电电流不过1.2A,CPU312IFM不过0.8A。所以,每个机架所能安装的模块数量除了不能大于8块外,还要受到背板总线5V供电电流的限制,即每个机架上各模块消耗的5V电流之和应小于该机架大的供电电流。?? 如果只扩展两个机架,可选用比较经济的IM365接口模块对,这一对接口模块由1m长的连接电缆相互固定连接。IM365不提供直接5V电源,此时,在两个机架上直流5V的总电流耗量限在1.2A之内。且由于IM365不能给机架1提供通信总线,所以在机架1上只能安装信号模块,而不能安装通信等其它智能模块。
1 概 述
在组合机床自动线中,一般根据不同的加工精度要求设置三种滑台(1)液压滑台,用于切削量大,加工精度要求较低的粗加工工序中;(2)机械滑台,用于切削量中等,具有一定加工精度要求的半精加工工序中;(3)数控滑台,用于切削量小,加工精度要求很高的精加工工序中。可编程控制器(简称PLC)以其通用性强、可靠性高、指令系统简单、编程简便易学、易于掌握、体积小、维修工作少、现场接口安装方便等一系列优点,被广泛应用于工业自动控制中。特别是在组合机床自动生产线的控制及CNC机床的S、T、M功能控制显示出其的性能。PLC控制的步进电机开环伺服机构应用于组合机床自动生产线上的数控滑台控制,可省去该单元的数控系统使该单元的控制系统成本降低70~,甚至只占用自动线控制单元PLC的3~5个I/O接口及<1KB的内存。特别是大型自动线中可以使控制系统的成本显著下降。
2 PLC控制的数控滑台结构
一般组合机床自动线中的数控滑台采用步进电机驱动的开环伺服机构。采用PLC控制的数控滑台由可编程控制器、环行脉冲分配器、步进电机驱动器、步进电机和伺服传动机构等部分组成,伺服传动机构中的齿轮Z1、Z2应该采取消隙措施,避免产生反向死区或使加工精度下降;而丝杠传动副则应该根据该单元的加工精度要求,确定是否选用滚珠丝杠副。采用滚珠丝杠副,具有传动**、系统刚度好、传动精度高、使用寿命长的优点,但成本较高且不能自锁。
3 数控滑台的PLC控制方法
数控滑台的控制因素主要有三个:
3.1 行程控制
一般液压滑台和机械滑台的行程控制是利用位置或压力传感器(行程开关/死挡铁)来实现;而数控滑台的行程则采用数字控制来实现。由数控滑台的结构可知,滑台的行程正比于步进电机的总转角,因此只要控制步进电机的总转角即可。由步进电机的工作原理和特性可知步进电机的总转角正比于所输入的控制脉冲个数;因此可以根据伺服机构的位移量确定PLC输出的脉冲个数:
n= DL/d (1)
式中 DL——伺服机构的位移量(mm)
d ——伺服机构的脉冲当量(mm/脉冲)
3.2 进给速度控制
伺服机构的进给速度取决于步进电机的转速,而步进电机的转速取决于输入的脉冲频率;因此可以根据该工序要求的进给速度,确定其PLC输出的脉冲频率:
f=Vf/60d (Hz) (2)
式中 Vf——伺服机构的进给速度(mm/min)
3.3 进给方向控制
进给方向控制即步进电机的转向控制。步进电机的转向可以通过改变步进电机各绕组的通电顺序来改变其转向;如三相步进电机通电顺序为A-AB-B-BC-C-CA-A…时步进电机正转;当绕组按A-AC-C-CB-B-BA-A…顺序通电时步进电机反转。因此可以通过PLC输出的方向控制信号改变硬件环行分配器的输出顺序来实现,或经编程改变输出脉冲的顺序来改变步进电机绕组的通电顺序实现。
4 PLC的软件控制逻辑
由滑台的PLC控制方法可知,应使步进电机的输入脉冲总数和脉冲频率受到相应的控制。因此在控制软件上设置一个脉冲总数和脉冲频率可控的脉冲信号发生器;对于频率较低的控制脉冲,可以利用PLC中的定时器构成,如图2所示。脉冲频率可以通过定时器的定时常数控制脉冲周期,脉冲总数控制则可以设置一脉冲计数器C10。当脉冲数达到设定值时,计数器C10动作切断脉冲发生器回路,使其停止工作。伺服机构的步进电机无脉冲输入时便停止运转,伺服执行机构定位。当伺服执行机构的位移速度要求较高时,可以用PLC中的高速脉冲发生器。不同的PLC其高速脉冲的频率可达4000~6000Hz。对于自动线上的一般伺服机构,其速度可以得到充分满足。
5 伺服控制、驱动及接口
5.1 步进电机控制系统的组成
步进电机的控制系统由可编程控制器、环行脉冲分配器和步进电机功率驱动器组成,控制系统中PLC用来产生控制脉冲;通过PLC编程输出一定数量的方波脉冲,控制步进电机的转角进而控制伺服机构的进给量;同时通过编程控制脉冲频率——既伺服机构的进给速度;环行脉冲分配器将可编程控制器输出的控制脉冲按步进电机的通电顺序分配到相应的绕组。PLC控制的步进电机可以采用软件环行分配器,也可以采用如图1所示的硬件环行分配器。采用软环占用的PLC资源较多,特别是步进电机绕组相数M>4时,对于大型生产线应该予以充分考虑。采用硬件环行分配器,虽然硬件结构稍微复杂些,但可以节省占用PLC的I/O口点数,目前市场有多种**芯片可以选用。步进电机功率驱动器将PLC输出的控制脉冲放大到几十~上百伏特、几安~十几安的驱动能力。一般PLC的输出接口具有一定的驱动能力,而通常的晶体管直流输出接口的负载能力仅为十几~几十伏特、几十~几百毫安。但对于功率步进电机则要求几十~上百伏特、几安~十几安的驱动能力,因此应该采用驱动器对输出脉冲进行放大。
5.2 可编程控制器的接口
如伺服机构采用硬件环行分配器,则占用PLC的I/O口点数少于5点,一般仅为3点。其中I口占用一点,作为启动控制信号;O口占用2点,一点作为PLC的脉冲输出接口,接至伺服系统硬环的时钟脉冲输入端,另一点作为步进电机转向控制信号,接至硬环的相序分配控制端,如图3所示;伺服系统采用软件环行分配器时,
6 应用实例与结论
将PLC控制的开环伺服机构用于某大型生产线的数控滑台,每个滑台仅占用4个I/O接口,节省了CNC控制系统,其脉冲当量为0.01~0.05mm,进给速度为Vf=3~15m/min,完全满足工艺要求和加工精度要求
PLC的存储器包括系统存储器和用户存储器两部分。
系统存储器用来存放由PLC生产厂家编写的系统程序,系统程序固化在ROM内,用户不能直接改,它使PLC具有基本的功能,能够完成PLC设计者规定的各项工作。系统程序质量的好坏,很大程度上决定了PLC的性能,其内容主要包括三部分。部分为系统管理程序,它主要控制PLC的运行,使整个PLC按部就班地工作。二部分为用户指令解释程序,通过用户指令解释程序,将PLC的编程语言变为机器语言指令,再由CPU执行这些指令。三部分为标准程序模块与系统调用,它包括许多不同功能的子程序及其调用管理程序,如完成输入、输出及特殊运算等的子程序。PLC的具体工作都是由这部分程序来完成的,这部分程序的多少也决定了PLC性能的高低。
用户存储器包括用户程序存储器(程序区)和功能存储器(数据区)两部分。用户程序存储器用来存放用户针对具体控制任务用规定的PLC编程语言编写的各种用户程序,以及用户的系统配置。用户程序存储器根据所选用的存储器单元类型的不同,可以是RAM(有掉电保护)、EPROM或EEPROM存储器,其内容可以由用户任意修改或增删。用户功能存储器是用来存放(记忆)用户程序中使用器件的ON/OFF状态/数值数据等。用户存储器容量的大小,关系到用户程序容量的大小,是反映PLC性能的重要指标之一。
6ES72111BE400XB0 CPU 1211C AC/DC/Rly,6输入/4输出,集成2AI 6ES72111AE400XB0 CPU 1211C DC/DC/DC,6输入/4输出,集成2AI 6ES72111HE400XB0 CPU 1211C DC/DC/Rly,6输入/4输出,集成2AI 6ES72121BE400XB0 CPU 1212C AC/DC/Rly,8输入/6输出,集成2AI 6ES72121AE400XB0 CPU 1212C DC/DC/DC,8输入/6输出,集成2AI 6ES72121HE400XB0 CPU 1212C DC/DC/Rly,8输入/6输出,集成2AI 6ES72141BG400XB0 CPU 1214C AC/DC/Rly,14输入/10输出,集成2AI 6ES72141AG400XB0 CPU 1214C DC/DC/DC,14输入/10输出,集成2AI 6ES72141HG400XB0 CPU 1214C DC/DC/Rly,14输入/10输出,集成2AI 6ES72151BG400XB0 CPU 1215C AC/DC/Rly,14输入/10输出,集成2AI/2AO 6ES72151AG400XB0 CPU 1215C DC/DC/DC,14输入/10输出,集成2AI/2AO 6ES72151HG400XB0 CPU 1215C DC/DC/Rly,14输入/10输出,集成2AI/2AO 6ES72171AG400XB0 CPU 1217C DC/DC/DC,14输入/10输出,集成2AI/2AO


)是专业从事西门子工业自动化产品销售和系统集成的**企业。在西门子工控领域,公司以精益求精的经营理念,从产品、方案到服务,致力于塑造一个“行业*”,以实现可持续的发展。
多年以来,公司坚持“以客户为本,与客户共同发展”的思想,全力以赴为工矿用户、设计单位、工程公司提供高性价比、高稳定性、高可靠性的整体解决方案。
“我们不仅仅销售优质的产品”是公司每个员工的工作信条,在为客户提供产品和方案的过程中,我们愿意倾听客户,和客户共同完善,不断提高服务质量,追赶客户的期望。以此为基础,我们追求客户、厂商和员工三方的共赢。
本公司与德国SIEMENS公司自动化与驱动部门的长期紧密合作过程中,建立了良好的相互协作关系,在自动化产品与驱动产品业务逐年成倍增长,为广大用户提供了SIEMENS的较新的技术及自动控制的较佳解决方案。
从事工业自动化科技领域内的技术开发、技术咨询、技术服务,气动元件,电机配件,水处理设备,电力设备,电子元器件,仪器仪表,仪器设备,传感器,电机,电控设备,五金机电,工业自动化控制设备,家用电器,工具刃具,电线电缆,机械设备及配件,电器成套设备销售
本店是实体公司,专业销售工业自动化产品,本店销售的产品均是全新**, 本店可签订正式的销售合同,并可开具17%的增值税,税点另算。
欢迎来到浔之漫智控技术(上海)有限公司网站,我公司位于历史文化悠久,近代城市文化底蕴深厚,历史古迹众多,有“东方巴黎”美称的上海市。 具体地址是上海松江公司街道地址,联系人是刘经理。
主要经营浔之漫智控技术(上海)有限公司是一家西门子plc代理商和西门子代理商,西门子价格每年都在变,2019年西门子plc模块报价单,现在价格是一落千丈,其实大多数经销商可以在今年多备货,因为以后估计要涨价,所以趁着今年的大降价,咱们来一批备货吧! 。
单位注册资金:人民币 10 万元以下。
价格战,是很多行业都有过的恶性竞争,不少厂家为了在价格战役中获胜,不惜以牺牲产品质量为代价,而我们公司坚决杜绝价格战,坚持用最优的原材料及最先进的技术确保产品质量,确保消费者的合法利益。
本页链接:http://www.cg160.cn/vgy-99760780.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
)是专业从事西门子工业自动化产品销售和系统集成的**企业..
- 我要给“潮州西门子PLC代理商”留言
- 更多产品


















