- 产品描述
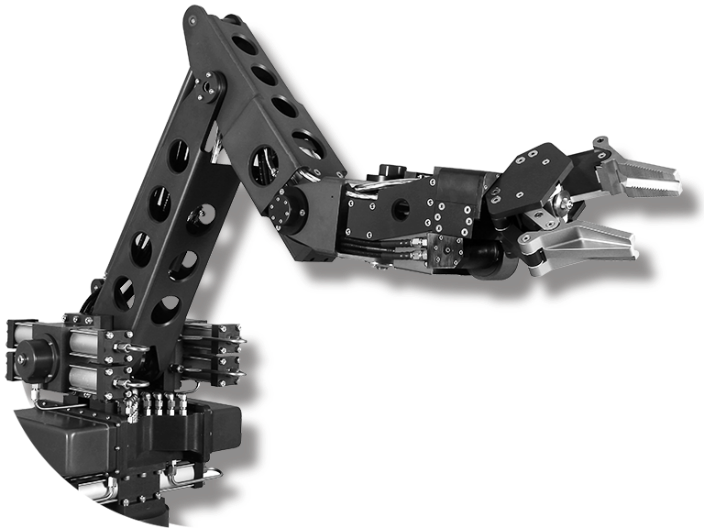
“Mercury水星”6+1轴主从控制液压机械臂Mercury水星液压机械臂是一款高度集成化的产品级液压驱动机械臂,江苏智能液压机械臂优势,采用高保真力反馈和主从控制技术,确保高精度作业动作,执行精细操作;**度和高密闭性设计,确保液压无泄漏,并在水下3000米可靠运行;高度集成化设计,以**级为标准,确保产品在恶劣环境下正常工作。该产品由浙江凯富博科科技有限公司开发打造,该公司是****的主从控制特种作业机器人系统制造商以及解决方案提供商。公司以“让机器人完成急难险重的工作”为使命,江苏智能液压机械臂优势,江苏智能液压机械臂优势,致力于通过技术和产品的研发,为特种作业提供一份安全**,让我们服务的群体生活得较好。欢迎来电咨询。液压机械臂的组成是哪些?江苏智能液压机械臂优势
关节型液压机械臂的运动主要由旋转与回转两种形式组成,其特点是动作灵敏、通用性强,在相同的工作条件下运行范围比较大,能够抓取靠近机座的工作对象,同时可拟合操作空间内的任意曲线。根据驱动方式可将机械臂分为液压驱动、气压驱动、电力驱动、机械传动等类型。根据关节连接方式可分为串联结构、并联结构、混联结构型机器臂。串联型机械臂因其具有动作灵敏、通用性强等与关节型机械臂相似的结构特点,在工业领域中受到广泛应用。根据用途可将机械臂分为**机械臂、通用机械臂两类。浙江液压机械臂液压机械臂适用于哪些场景?
液压机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其*特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。机器人系统是由视觉传感器、机械臂系统及主控计算机组成,其中机械臂系统又包括模块化机械臂和灵巧手两部分。整个系统的构建模型
Denavit-Hartenberg(D-H)变换是对机器人连杆和关节进行建模的一种非常简单的方法。在机器人的每个连杆上都固定一个坐标系,然后用4×4的齐次变换矩阵来描述相邻两连杆的空间关系。通过依次变换可**终推导出末端执行器相对于基坐标系的位姿,从而建立机器人的运动学方程。机械臂的每个关节只可以实现一种运动形式,如旋转或者移动。因而,液压机械臂关节分为转动关节和移动关节两类。在相邻两个关节(自由度)之间存在一个连杆。机械臂主要包含关节和连杆两部分。如何生产一款性能好的液压机械臂?
圆柱坐标型液压机械臂是由直角坐标型机械臂机座位置的移动副改变成回转副而得来。圆柱坐标型机械臂的运动形式为“回转—伸缩—伸缩”。与直角坐标型相比,在相同的条件下所占空间较小,其他特点基本相同。较坐标型机械臂在运动中存在回转、仰俯、伸缩动作,工作空间可以形成一个球体,又称为球坐标型机械臂。该型机械臂的主要特点是结构紧凑,刚度好,具有较大的抓持能力,末端执行器活动灵敏、运动范围大,但结构较为复杂,运动精度较低,且运动控制困难。液压机械臂的生产厂家有哪些?上海简易液压机械臂排行榜
液压机械臂的应用场景有哪些?江苏智能液压机械臂优势
近年来,随着机器人技术的发展,应用高速度、高精度、高负载自重比的机器人结构受到工业和航空航天领域的关注。由于运动过程中关节和连杆的柔性效应的增加,使结构发生变形从而使任务执行的精度降低。所以,机器人机械臂结构柔性特征必须予以考虑,实现柔性机械臂高精度有效控制也必须考虑系统动力学特性。柔性机械臂是一个非常复杂的动力学系统,其动力学方程具有非线性、强耦合、实变等特点。而进行柔性臂动力学问题的研究,其模型的建立是较其重要的。柔性机械臂不仅是一个刚柔耦合的非线性系统,而且也是系统动力学特性与控制特性相互耦合即机电耦合的非线性系统。动力学建模的目的是为控制系统描述及控制器设计提供依据。一般控制系统的描述(包括时域的状态空间描述和频域的传递函数描述)与传感器/执行器的定位,从执行器到传感器的信息传递以及机械臂的动力学特性密切相关。江苏智能液压机械臂优势
凯富博科,2019-06-12正式启动,成立了液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人等几大市场布局,应对行业变化,顺应市场趋势发展,在创新中寻求突破,进而提升凯富博科,CathayBot的市场竞争力,把握市场机遇,推动机械及行业设备产业的进步。旗下凯富博科,CathayBot在机械及行业设备行业拥有一定的地位,品牌**持续增长,有望成为行业中的*。我们在发展业务的同时,进一步推动了品牌**完善。随着业务能力的增长,以及品牌**的提升,也逐渐形成机械及行业设备综合一体化能力。凯富博科始终保持在机械及行业设备领域**的前提下,不断优化业务结构。在液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人等领域承揽了一大批**项目,积极为更多机械及行业设备企业提供服务。

浙江凯富博科科技有限公司是****的主从控制特种作业机器人系统制造商以及解决方案提供商。公司以“让机器人完成急难险重的工作”为使命,致力于通过技术和产品的研发,为特种作业提供一份安全**,让我们服务的群体生活得较好。 公司的主要业务是提供作业级特种机器人产品、关键部件、整体解决方案,为在急难险重环境作业中解放人力、**人身安全提供产品和技术支持。凯富博科以至诚守信、创新进取、协作共赢为立足之本,坚持**技术与*相结合,锐意进取致力成为世界**特种作业机器人研发与服务的**化企业。 公司拥有一批特种机器人领域工作经验丰富的技术人员,专业涵盖机械、液压、测控、软件、通信、图像处理、人工智能等领域,依靠**的技术,不断为用户提供满意的特种作业装备产品是凯富博科始终不变的追求。
欢迎来到浙江凯富博科科技有限公司网站,我公司位于中国十佳宜居城市之一—金华市。 具体地址是浙江金华金东区公司街道地址,负责人是辛华伟。
主要经营液压机械臂|主从控制机器人|6+1轴机械臂|带电作业机器人。
单位注册资金:人民币 200 万元 - 300 万元。
本公司在机械产品这一领域倾注了无限的热忱和激情,公司一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌,携手共创美好明天!
本页链接:http://www.cg160.cn/vgy-94703334.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 杭州304不锈钢防爆风机批发 永动电机 性能完善 调流调压阀LT942X供应_低阻紧急关闭阀_阀门型号丰富 贺州钎尾套厂商 岩石凿岩作业 降低生产线成本 MES系统流水线 沈阳管链机 销售 水泥螺旋输送机 成都钎尾导套型号 液压凿岩机配件 岩石凿岩作业 输送速度快 升降机流水线 淮北精密加工服务 凿岩机配件 矿山开采 北海传动轴 南京破块器 定制 链管机 深圳清仓机防爆滑环规格 库存充足 辽宁导电滑环规格 快速发货
- 相关文章
- 江苏深海特种作业机器人设计 浙江凯富博科科技供应上海智能液压机械臂优势 浙江凯富博科科技供应江苏应急救援特种作业机器人系统 浙江凯富博科科技供应上海小型特种作业机器人生产厂家 浙江凯富博科科技供应浙江6+1 轴特种作业机器人哪家好 浙江凯富博科科技供应浙江智能特种作业机器人设计 浙江凯富博科科技供应浙江应急救援特种作业机器人哪家好 浙江凯富博科科技供应浙江工业特种作业机器人采购 浙江凯富博科科技供应浙江大型特种作业机器人设计 浙江凯富博科科技供应浙江多功能特种作业机器人联系方式 浙江凯富博科科技供应江苏小型液压机械臂供应商 浙江凯富博科科技供应上海深海工程特种作业机器人生产厂家 浙江凯富博科科技供应
- 我要给“江苏智能液压机械臂优势 浙江凯富博科科技供应”留言
- 更多产品