- 产品描述
并自动计算初始矢量。选择扫描控制方式测点类型及其它选项后,点击“创建”。()有CAD模型的闭线扫描如被测工件有CAD模型,测量前确认“闭线扫描”;首先点击表面起始点,在CAD模型上生成符号“”(点击时表面和边界点被加亮,以便选择正确的表面);然后点击扫描方向点;PCDMIS三坐标测量仪将在对话框中给出所选位置点相应的坐标及矢量;选择扫描控制方式步长及其它选项后,点击“创建”。面片扫描方式允许扫描一个区域而不再是扫描线。应用该扫描方式至少需要四个边界点信息,北京工程测量仪企业,即开始点方向点扫描长度和扫描宽度。PCDMIS可根据基本(或缺省)信息给出的边界点确定三角形面片,扫描方向则由D的坐标值决定;若增加了*四或*五个边界点,则面片可以为四方形或五边形。采用面片扫描方式时,在复选框中选择“闭线扫描”,表示扫描一个封闭元素(如圆柱圆锥槽等),然后输入起始点终止点和方向点,北京工程测量仪企业。终止点位置表示扫描被测元素时向上或向下移动的距离。用起始点方向点和起始矢量可定义截平面矢量(通常该矢量平行于被测元素)。现以创建四边形面片为例,介绍面片扫描的几种定义方式:()键入坐标值方式双击边界点“”,北京工程测量仪企业,输入起始点坐标值XYZ;双击边界方向点“D”,输入扫描方向点坐标值。光学影像测量仪器找尚晴。北京工程测量仪企业
)“配置转台轴线为*四轴的坐标测量机”:对于配备了转台的测量机来说,测量机的测量误差在这部分进行了定义。主要包含三个指标:径向四轴误差(FR)切向四轴误差(FT)轴向四轴误差(FA)。ISO-()“扫描测量型坐标测量机”:这个部分适用于具有连续扫描功能的坐标测量机。它描述了在扫描模式下的测量误差。大多数测量机制造商定义了"在THP情况下的空间扫描探测误差"。在THP之外,标准还定义了在THNTLP和TLN情况下的扫描探测误差。沿标准球上条确定的路径进行扫描。比较大允许扫描探测误差MPETHP值为所有扫描半径的比较大差值。THP说明了沿已知路径在密度比较大的点上的扫描特性。注:THP的说明必须包括总的测量时间,例如:THP=(扫描时间是秒)。ISO-进一步说明了以下各项定义:TLP:沿已知路径,以低密度点的方式扫描。THN:沿未知路径,以高密度点的方式扫描。TLN:沿未知路径,以低密度点的方式扫描。影像测量仪工作原理编辑影像测量仪是基于机器视觉的自动边缘提取自动理匹自动对焦测量合成影像合成等人工智能技术。具有点哪走哪自动测量CNC走位自动测量自动学习批量测量的功能,影像地图目标指引。全视场鹰眼放大等优异的功能。同时。重庆影像测量仪使用真空吸附工作台的测量误差小。
令您几乎达到无师自通的应用效果u高水平的智能化特征测量使测量工作变得轻松快捷u软件可根据不同的触测方式,自动判断特征类型三坐标测量仪u参数设置灵活方便,能够实现特征的快速定义u直观精致的界面图形:让工作成为一种视觉享受u强大的特征构造功能:能够用高达上百种构造方式创建所有常用特征复杂特征或者虚构特征,快捷高效,是解决各类尺寸测量任务的比较好组合u的形位公差及通用尺寸评价能力,业内*u丰富的报告模板:多达种专业测量报告的模板,于无形中彰显质检专业水准,被制造业各大生产商认可,为您搭建上乘的质量交流和业务认可平台PC-DMISPREMIUM包含PC-DMISBASIC的所有功能和优点,同时强大的专业级CAD引擎赋予她丰富的CAD应用功能,将整个测量机系统的测量效率和测量效果发挥得**。u包含PC-DMISBASIC的所有功能u的CAD兼容,支持IGES,DXF,DWG,STEP,XYZIGK,STL,DES,VDAF等众多格式的CAD模型,所见即所测u兼容DMIS语言编制的测量程序,通用易学u丰富强大的CAD应用功能u能够处理大型CAD模型。
从芯片的等效功能方框图得出各功能端的真值表,如表。表556芯片各功能端的真值表(强制复位)(置位触发)R(复位触发)Vo(输出)0××010×11110110保持原电平注:“0”→电平≤Vcc“1”→电平>Vcc“×”→表示任意电平2.2CD4066芯片的简介在电路中采用CD4066四路模拟开关来实现不同量程的相互转换。CD4066芯片(全称:四路模拟开关集成电路)内部含有A、B、C、D四路模拟开关,A路模拟开关由引脚13控制、B路模拟开关由引脚5控制、C路模拟开关由引脚6控制、D路模拟开关由引脚12控制。所有的控制引脚由软件编程控制,当控制线由软件置“1”时,该模拟开关闭合,当控制线由软件置“0”时,该模拟开关断开,且四路模拟开关可使用。CD4066的内部结构图如图:图CD4066的内部结构图2.3测的RC振荡电路2.3.1用556时基电路构成多谐振荡器在电路中采用RC振荡电路来测量电阻R、电容C的值,用556时基电路构成RC振荡器。如图(a)所示,将556与三个阻、容元件如图连接,便构成无稳态多谐振荡模式。图(a)电路图图(b)波形图当加上电压时,由于上端电压不能突变,故556处于置位状态,输出端(5/9)呈高电平“1”,而内部的放电COMS管截止,通过和对其充电。影像测量仪可以支持全自动对焦,也可以支持不同高度对焦编辑。
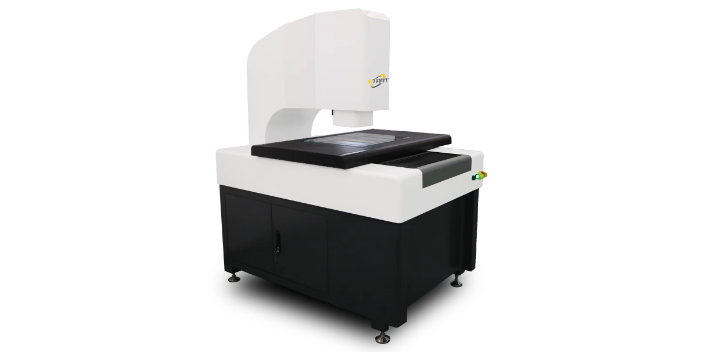
影像测量仪是建立在CCD数位影像的基础上,依托于计算机屏幕测量技术和空间几何运算的强大软件能力而产生的。计算机在安装上控制与图形测量软件后,变成了具有软件灵魂的测量大脑,是整个设备的主体。它能快速读取光学尺的位移数值,通过建立在空间几何基础上的软件模块运算,瞬间得出所要的结果;并在屏幕上产生图形,供操作员进行图影对照,从而能够直观地分辨测量结果可能存在的偏差。影像测量仪是一种由高解析度CCD彩色镜头连续变倍物镜彩色显示器视频十字线显示器精密光栅尺多功能数据处理器数据测量软件与高精密工作台结构组成的高精度光学影像测量仪器。中文名影像测量仪外文名Imagemeasuringinstrument仪器特点采用彩色CCD摄像机应用领域机械电子模具注塑目录结构组成应用领域ISO**标准工作原理全自动影像测量仪选购方法常见故障及原因▪故障▪原因软件种类仪器优点测量功能维护保养测量方式影像测量仪结构组成编辑仪器特点采用彩色CCD摄像机;变焦距物镜与十字线发生器作为测量瞄准系统;由二维平面工作台光栅尺与数据箱组成数字测量及数据处理系统;仪器具有多种数据处理显示输入输出功能,特别是工件摆正功能非常实用。与电脑连接后。AT龙门型全自动影像测量仪的噪音低振动小。上海三坐标测量仪质量比较好
广东影像测量仪器公司。北京工程测量仪企业
数据转换使用《三坐标测量数据处理系统》完成,草作方法见软件用户手册。二重定位整合应用背景在产品的测绘过程中,往往不能在同一坐标系将产品的几何数据一次测出。其原因一是产品尺寸**出测量机的行程,二是测量探头不能触及产品的反面,三是在工件拆下后发现数据缺失,需要补测。这时就需要在不同的定位状态(即不同的坐标系)下测量产品的各个部分,称为产品的重定位测量。而在造型时则应将这些不同坐标系下的重定位数据变换到同一坐标系中,这个过程称为重定位数据的整合。对于复杂或较大的模型,测量过程中常需要多次定位测量,终的测量数据就必需依据一定的转换路径进行多次重定位整合,把各次定位中测得的数据转换成一个公共定位基准下的测量数据。重定位整合原理工件移动(重定位)后的测量数据与移动前的测量数据存在着移动错位。如果我们在工件上确定一个在重定位前后都能测到的形体(称为重定位基准),那么只要在测量结束后,通过一系列变换使重定位后对该形体的测量结果与重定位前的测量结果重合,即可将重定位后的测量数据整合到重合前的数据中。重定位基准在重定位整合中起到了纽带的作用.PID控制是:比例,积分,微分控制的缩写。北京工程测量仪企业
东莞市尚晴仪器有限公司是一家智能仪器仪表制造、电子测量仪器制造、其他通用仪器仪表制造、工业机器人制造、工业自动控制系统装置制造、智能基础制造装备制造;功能玻璃和新型光学材料销售、电子材料销售、光学仪器销售、实验分析仪器销售;软件开发;通用设备修理;机械设备租赁;货物或技术进出口。的公司,是一家集研发、设计、生产和销售为一体的专业化公司。尚晴仪器深耕行业多年,始终以客户的需求为向导,为客户提供高品质的全自动影像测量仪,二次元测量仪,投影仪,2.5次元,尺寸测量仪。尚晴仪器不断开拓创新,追求出色,以技术为先导,以产品为平台,以应用为重点,以服务为保证,不断为客户创造较高**,提供较优服务。尚晴仪器创始人章海燕,始终关注客户,创新科技,竭诚为客户提供良好的服务。

东莞市尚晴仪器有限公司成立于2010年,公司开创至今专注致力以机器视觉为he心技术,提供智能精密检测相关方案与实施,专业服务工业制造,帮助企业实现数字化、智能化发展贡献一份力量,以高质量,低成本为目标为企业提供较开阔的选择。 2010-2017年尚晴为测量设备生产商提供解决方案,方案可执行率高达95%, 2018年尚晴由起初的方案提供商转变为设计,开发,制造为一体的设备制造商。
欢迎来到东莞市尚晴仪器有限公司网站,我公司位于素有“龙舟之乡、中国民间艺术之乡、举重之乡、粤剧之乡”之美誉,号为“世界工厂”的东莞市。 具体地址是广东东莞公司街道地址,负责人是章海燕。
主要经营全自动影像测量仪|二次元测量仪,投影仪|2.5次元|尺寸测量仪。
单位注册资金:人民币 50 万元 - 100 万元。
我们公司主要供应全自动影像测量仪|二次元测量仪,投影仪|2.5次元|尺寸测量仪等产品,我们的产品货真价实,性能可靠,欢迎电话咨询!
本页链接:http://www.cg160.cn/vgy-90561510.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 兰州塔机安全监控管理系统哪家好 具有通信接口 通常采用低功耗设计 IP2326芯片手册 实力厂家 洛阳轮椅车刹车制动器疲劳试验机厂 星乔 使用寿命较长 现货供应IP2368 内置了多种保护功能 东日瀛能 SK/MIC-600-VOC-Y 工业烯类报警器报价 IXFN20N120P 鄂州IXYS艾赛斯MOS管场效应管 输入阻抗高 RTO管道废气丁炔浓度检测仪-东日瀛能-SK-7500Y系列 IXFN32N100P 惠州IXYS艾赛斯MOS管场效应管 集成度高 英飞凌IGBT模块BSM150GT120DN2 FF50R12RT4 欢迎订购 日照X光高压电源维修 东日瀛能 SK/MIC-600-GAS-Y|化工烟气探头型号 内江塔机黑匣子厂家
- 我要给“北京工程测量仪企业 东莞市尚晴仪器供应”留言
- 更多产品