- 产品描述
机械人*们可以把精力放在机器人该做什么?手和工具应该放在哪?而不是该怎样实现所要求的动作。对于具有很多运动部件的复杂的机械结构,机械手实现一种动作,机械臂可以有不同运动的方法。比如说,人的手臂,手的位置和方向一定时,肘部可以有不同的运动。Actin就是利用这种运动学的冗长性自动生成智能控制,包括避开碰撞,关节角度的限值。能量小运动和抵抗环境外力能力比较好化。通过可设置的面向对象的设计,Actin可以应用于多种机器人。它可以既可以应用于固定式的工业机器人,比如说,工厂自动生产线的机器人。也可以应用于移动式的机器人,安徽的双目红外光学公司,如:家庭和娱乐用机器人、协作机器人,安徽的双目红外光学公司,安徽的双目红外光学公司。Actin适用于很多种型式关节和手部,它可以仿真和控制无限个自由度和分支联接的结构。Actin的能力包括:·动态模拟任何台数的机器人·蒙地卡罗(MonteCarlo)仿真分析·模拟柔性关节·视觉演示机器人·控制系统的表达用可扩展标记语言。双目红外光学医学设备价格,可以咨询位姿科技(上海)有限公司;安徽的双目红外光学公司
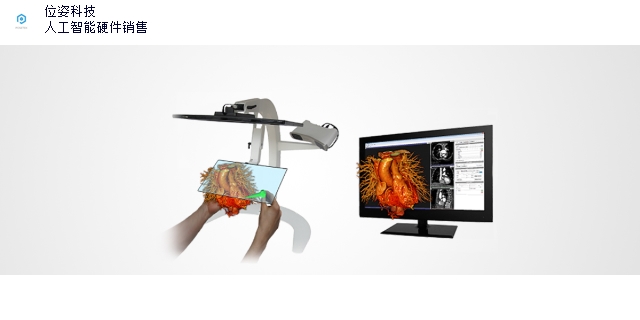
PSTBase是为仿真解决方案打造的理想光学定位交互系统PSTBase系列是专门为满足定位距离为20厘米至3米的用户需求而设计,其基础线定位以及小追踪距离为20厘米。PSTBase是适用于桌面式定位测量交互或用于仿真设备的理想解决方案(例如,可用于汽车、飞机以及手术仿真或导航等)。PST的定位测量系列产品均为提前校准、即插即用的高精度系统。每台PSTBase都是完全单独的测量单元。可直接开箱使用,*校准且捕捉摄像头*进行注册。。PSTBase的数据结果可通过以太网进行完全透明分享。只需在另外一台电脑上安a装客户软件并进行连接。PSTBase光学追踪拥有稳定的定位技术以及新颖的外观光学追踪器PSTBase使用3D定位技术,可测量固定在被捕捉物体上的主动或被动标记的3D位置。使用此信息,每台PSTBase设备都可以确定在特定测量容积内的被标记物体的位置和方向。使用PSTBase,您可将任意物体转换为3D测量目标。对于需要根据自己的特定用例进行定位测量的用户,可使用定制化解决方案。如您想要了解具体案例或讨论可能性,请与我们联系。PSTBase光学定位仪案例研究:C-Station3DWorkstation将PSTBase与PS-Medtech的C-Station集成。该系统是用于可视化复杂医疗数据的完整工具。浙江双目红外光学联系地址江苏双目红外光学医疗设备价格,可以咨询位姿科技(上海)有限公司;
全自动焦距仪产品特点:●测量精度高●实时在线测量●操作简单●测试报告打印产品应用:●单透镜测试●透镜组测试●柱面镜测试●非球面镜测试球面测试工作站产品特点:●测量精度高●采用**气浮技术●实时在线测量●操作简单●透射、反射双模式测量●测试口径范围广产品应用:●单透镜测试●透镜组测试●光学组件测试●镜组偏心测试●内窥镜测试●红外反射偏心测试、装调数字光电自准直仪产品特点:●大视场●双轴同时测量●多种测量模式可选●测量精度高●操作简单●计算结果快速实时显示产品应用:●光学微小角度测试●光学定向●光学检测及调校●精密转台回转精度、定位精度测试●精密机械产品检测及安装定位●微小震动检测数字偏心仪产品特点●测量精度高●采用**气浮技术●实时在线测量●操作简单●透射、反射双模式测量产品应用●单透镜测试●透镜组测试●光学组件测试●镜组胶合●镜头装调以上的几种光学测量仪器很受广大用户的欢迎,如果您对这些仪器有兴趣,可以通过下面的联系方式咨询或者购买!
并对实际测量过程中的浮标定位误差、光学测量误差、光学模糊效应和测量时戳误差进行了建模和仿真分析,给出存在这些误差条件下光学浮标阵对机动目标的定位精度指标。1联合定位数学模型按照系统可观测性理论,单个光学浮标依靠对目标方位信息的持续观测获得目标航向Cm和距离速度比(D0/Vm)信息,无法获得目标的全要素信息(即目标初距D0、目标速度Vm以及Cm)。为达到对目标的全要素定位,至少需要2个光学浮标联合工作,利用双浮标分别测量目标方位与浮标之间的孔径尺度特征,通过三角定位原理获得目标的概略位置。但在目标运动到双浮标连线附近时,由于测量方位一致,定位算法无法收敛,且在目标发现自身被攻击时进行机动后,双浮标一般无法达到提供攻击目标指示的需求,因此需多个浮标综合使用以实现该战术目的。以3光学浮标为例说明多光学浮标联合定位的滑窗非线性小二乘法数学原理,该原理可以扩展为多浮标应用,却不局限于3浮标,如图1所示。图1多光学浮标联合定位示意图2误差模型方位测量误差方位测量误差包括两部分,一部分由传感器测量的随机性引起,另一部分由光学设备提取目标方位的模糊性引起。光学浮标浮动在海面上,内部包含增稳装置。双目红外光学医疗设备咨询,可以联系位姿科技(上海)有限公司;
近些年来,机器人行业发展迅速,机器人被广泛应用于各个领域尤其是工业领域,不难看出其巨大潜力。与此同时,我们也必须认识到机器人行业的蓬勃发展,离不开**的科研进步和技术支撑。以下,我们将盘点机器人*技术,供大家参考。1.软体机器人——柔性机器人技术柔性机器人关阀门柔性机器人技术是指采用柔韧性材料进行机器人的研发、设计和制造。柔性材料具有能在大范围内任意改变自身形状的特点,在管道故障检查、医疗诊断、侦查探测领域具有广泛应用前景。2.机器人可变形——液态金属控制技术英国科学家通过编程控制液态金属液态金属控制技术指通过控制电磁场外部环境,对液态金属材料进行外观特征、运动状态准确控制的一种技术,可用于智能制造、灾后救援等领域。液态金属是一种不定型、可流动液体的金属,目前的技术重点主要集中在液态金属的铸造成型上,液态机器人还只是一个美好的愿景。3.生物信号可以控制机器人——生肌电控制技术意大利技术研究院研发的儿童机器人iCub生肌电控制技术利用人类上肢表面肌电信号来控制机器臂,在远程控制、医疗康复等领域有着较为广阔的应用。河南双目红外光学技术,可以咨询位姿科技(上海)有限公司;普陀区双目红外光学价钱多少
江西双目红外光学技术,可以咨询位姿科技(上海)有限公司;安徽的双目红外光学公司
当追踪目标物粘贴marker之后,PST光学定位系统需要对其进行识别。在主窗口中按“Newtargetmodel”(新目标模型)选项即可选择训练页面(请见下图)。训练是“教”系统识别新追踪目标物的过程,即在PST摄像头**(追踪范围内)缓慢旋转物体,系统根据marker点的位置关系对其进行识别并建模,然后该模型即可用于追踪交互。训练步骤:1.在目标物上添加四个或多个标记点。将目标物放置在PST工作空间中(无遮挡),清理该空间里所有其它追踪目标物和反光材料,因为在训练过程中如果有多个物体可能会造成目标物识别错误。该过程可以训练多包含多达100个标记点的单个目标物。2.点击“开始”按钮,下图显示为一个示例训练的片段。灰色点表示被自身遮挡的标记点。3.缓慢而平稳地移动并旋转目标物,以便将所有标记点显示给系统。确保在训练过程中始终保持三个或更多标记点可见。如果没有足够的标记点可见,训练过程将中止,并显示错误对话框。在这种情况下,请关闭错误对话框并重新开始训练操作。如果问题仍然存在,请检查目标物各个角度是否都有足够的标记点可见。当显示的追踪目标物标记点数量和物体上的实际标记点数量一致时,请按“停止”按钮。安徽的双目红外光学公司
位姿科技(上海)有限公司主营品牌有Atracsys,PST,发展规模团队不断壮大,该公司贸易型的公司。公司是一家私营独资企业企业,以诚信务实的创业精神、专业的管理团队、踏实的职工队伍,努力为广大用户提供高品质的产品。公司业务涵盖光学定位,光学导航,双目红外光学,光学追踪,价格合理,品质有保证,深受广大客户的欢迎。位姿科技将以真诚的服务、创新的理念、高品质的产品,为彼此赢得全新的未来!
位姿科技(上海)有限公司总部位于中国上海,研发团队由国内医院临床*和医学仿真领域专业技术工程师组成。为了让技术较好的服务医疗,我们立足于智能医疗领域,致力于提升临床医疗与医疗教育的智能化水平。凭借医学仿真及机器人领域多年的技术积累,我们专注于为医疗、科研及教育用户提供手术导航定位、医学影像仿真、医疗机器人研发、科研机器人开发、三维光学测量等解决方案。我们服务的客户涵盖985高校、科研院所、**医院、医学院、航空航天、科研公司等企事业单位。公司目前已经与荷兰、德国、瑞士、丹麦、加拿大、美国等众多国外企业建立了战略合作伙伴关系。
欢迎来到位姿科技(上海)有限公司网站,我公司位于历史文化悠久,近代城市文化底蕴深厚,历史古迹众多,有“东方巴黎”美称的上海市。 具体地址是上海奉贤公司街道地址,负责人是齐雨辰。
主要经营光学定位|光学导航|双目红外光学|光学追踪。
单位注册资金:人民币 30 万元 - 50 万元。
我们的产品优等,服务优质,您将会为选择我们而感到放心,我们将会为得到您认可而感到骄傲。
本页链接:http://www.cg160.cn/vgy-85672327.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 我要给“安徽的双目红外光学公司 位姿科技供应”留言
- 更多产品

平顶山pp防水垫板哪家好 淄博宏威塑胶供应

宁夏真空锅炉维修售后 甘肃方快环保设备供应

甘肃兰州复合循环锅炉安装服务 甘肃方快环保设备供应

连云港汽车升降尾板参数 欢迎来电 无锡海阁力斯液压供应

南京废水蒸发设备 欢迎咨询 苏州圣天迈电子科技供应

无锡IC清洁除胶剂供货商 服务为先 苏州圣天迈电子科技供应

广西智慧式安全用电监管平台 来电咨询 上海冉能自动化科技供应

贵州智能安全用电管理系统 欢迎咨询 上海冉能自动化科技供应

杭州进口保温板厂家 金华市浩明挤塑板科技供应

南明区盆骨恢复作用有哪些 抱诚守真 贵州汉苑良方供应

南明区腹直肌康复怎么做的 推荐咨询 贵州汉苑良方供应







