- 产品描述
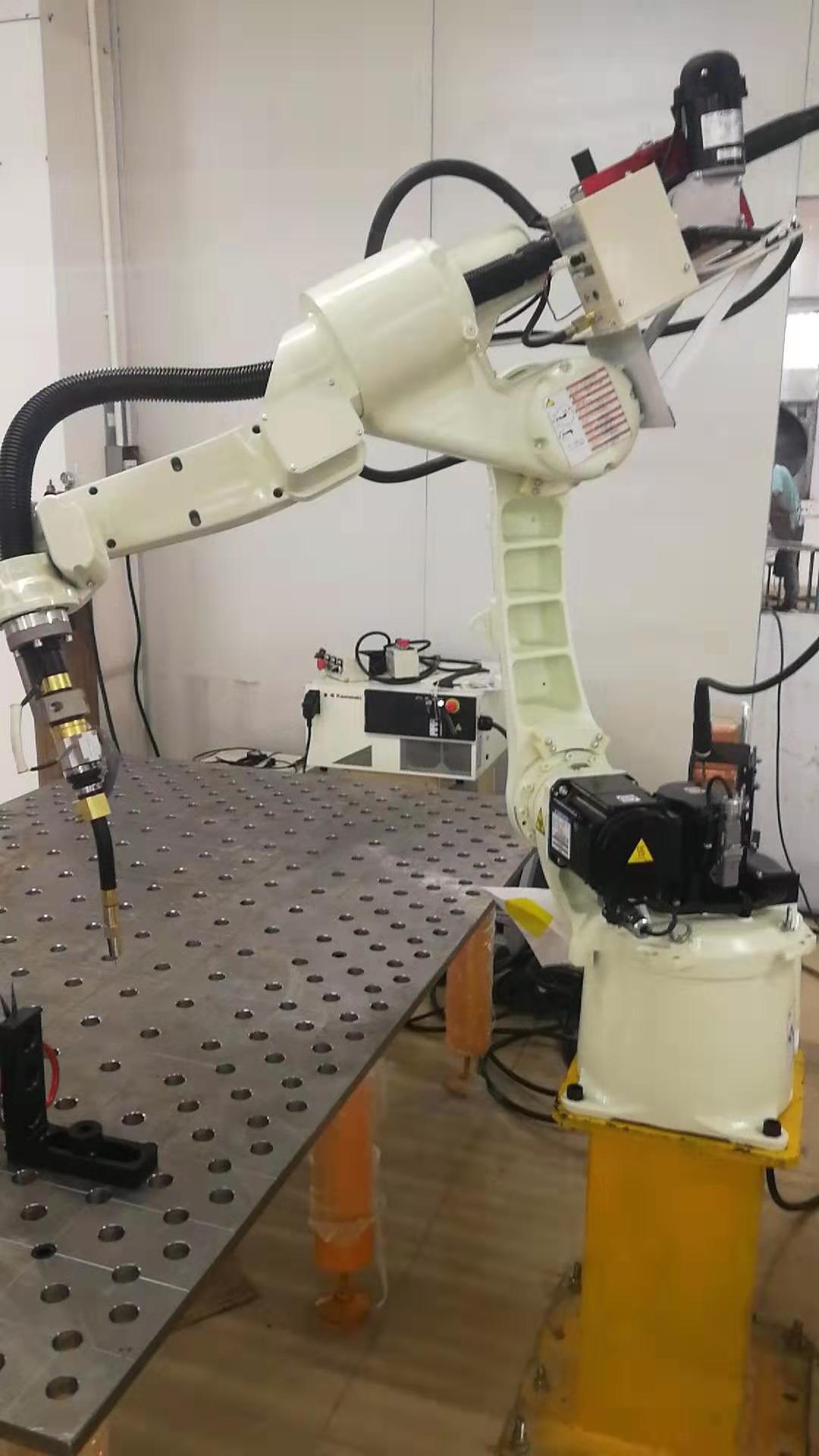
**生产的焊接用机器人基本上都属关节机器人,绝大部分有6个轴。其中,1、2、3轴可将末端工具送到不同的空间位置,而4、5、6轴解决工具姿态的不同要求。焊接机器人本体的机械结构主要有两种形式:一种为平行四边形结构,一种为侧置式(摆式)结构。。侧置式(摆式)结构的主要优点是上、下臂的活动范围大,使机器人的工作空间几乎能达一个球体。
焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据**标准化组织(ISO)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipulator)
焊接机器人主要运用行业:工程机械、矿山机械、铁路机车、电器家具等行业。
焊接机器人是从事焊接(包括切割与喷涂)的工业机器人,它主要包括机器人和焊接设备两部分。其中,机器人由机器人本体和控制柜(硬件及软件)组成;而焊接装备,以弧焊及点焊为例,则由焊接电源(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人,还应配有传感系统,如激光或摄像传感器及其控制装置等。
1、点焊机器人的特点
由于采用了一体化焊钳,焊接变压器装在焊钳后面,所以点焊机器人的变压器必须尽量小型化。点焊机器人的焊钳,用电伺服点焊钳,焊钳的张开和闭合由伺服电机驱动,码盘反馈,使焊钳的张开度可以根据实际需要任意选定并预置,而且电极间的压紧力也可以无级调节。
2、弧焊机器人的特点
弧焊机器人多采用气体保护焊方法(MAG、MIG、TIG),通常的晶闸管式、逆变式、波形控制式、脉冲或非脉冲式等的焊接电源都可以装到机器人上作电弧焊。当机器人把焊枪送到某些位置,使软管处于多弯曲状态,会严重影响送丝的质量,所以送丝机的安装方式一定要考虑保证送丝稳定性的问题。

我公司位于深圳市公明,于2005年成立,拥有3台汽车配送。仓库面积1500平方,我们专业批发各种焊接设备,焊接材料,各种劳保用品。我们有3名修理工程师,专业修理各种焊接设备,出租一切焊接切割设备,欢迎大家联系、、我的焊机Q,上面有焊接视频
欢迎来到深圳市欣东港贸易有限公司网站,我公司位于经济发达,交通发达,人口密集的中国经济中心城市—深圳。 具体地址是广东深圳公司街道地址,负责人是邢浩。
主要经营自动焊机。
欢迎关注本公司,本公司专业经营焊接切割 焊接设备 超声波焊设备 等产品,拥有经典的技术和一流的服务!
本页链接:http://www.cg160.cn/vgy-80929950.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
关于深圳市欣东港贸易有限公司
商铺首页 |
更多产品 |
联系方式
我公司位于深圳市公明,于2005年成立,拥有3台汽车配送。仓库面积1500平方,我们专业批发各种焊接设备,焊接材料,各种劳保用品。我们有3名修理工程师,专业修理各种焊接设备,出租一切焊接切割设备,欢迎大家联系、、我的焊机Q,上面有焊接视频
- 我要给“广州自动焊接机器人厂家 机器人焊接机”留言
- 更多产品