- 产品描述
NDI)和两个EM追踪器的腹腔镜的追踪准确性,该光学追踪器追踪安装在轴上的回射标记,而EM追踪器将传感器嵌入近端。然后,我们使用触控笔测试追踪器的位置测量精度和距离测量精度。,我们评估了由EM追踪的腹腔镜和EM追踪的LUS探头组成的图像引导系统的准确性。结果在使用标准评估板的实验中,两个光学追踪器(Atracsys&NDI)在位置和方向测量中的抖动比EM追踪器小。此外,光学追踪器在测试体积内显示出较好的方向测量一致性。但是,它们的相对位置测量精度会随着距离的增加而显着降低,而EM追踪器的性能却是稳定的。在50mm的距离处,两个光学追踪器(Atracsys&NDI)的RMS误差分别为,而EM追踪器的RMS误差为。在250mm距离处,两个光学追踪器(Atracsys&NDI)的RMS误差分别变为,而EM追踪器的RMS误差为。在使用触控笔的实验中,两个光学追踪器(Atracsys&NDI)在定位触控笔笔尖时的RMS误差为,EM追踪器为。我们的电磁追踪腹腔镜和LUS系统组合的原型使用代表性的校准方法,静安区光学追踪公司地址,静安区光学追踪公司地址,显示腹腔镜的RMS点定位误差为,静安区光学追踪公司地址,LUS探头的RMS点定位误差为,前者的较大误差主要是由于三角测量误差造成的使用窄基线立体腹腔镜时。黑龙江光学追踪技术公司,可以联系位姿科技(上海)有限公司;静安区光学追踪公司地址
Atracsys提供定制化光学定位导航解决方案Atracsys能满足客户高要求的嵌入式系统开发。凭借在电子、FPGA、光学、机械、**和初级软件编程方面的广阔知识,Atracsys助力客户项目转化为成品。Atracsys可以涵盖客户项目的所有阶段:可行性研究和基础调研产品规格参数制定硬件/电力开发嵌入式软件开发机械/光学设计产品量产准备广阔的测试认证我们坚提供始终如一的品质、可靠性和鲁棒性,来对客户特定的软硬件(精度级别、采集速度、工作量、扩展等)进行开发。部分定制开发项目-紧凑型手持式骨科手术导航追踪系统Atracsys为NaviswissAG打造了创新的紧凑型手持导航追踪系统。NaviswissAG小化并简化了骨科的手术流程。使用8位汇编器编程微控制器在低功耗电子产品中实现。-铁路轨道平整度测量系统基于FPGA的光学三角测量系统,使用高速线性CCD。-移动机器人障碍物检测系统基于CMOS成像器和线激光的障碍物检测系统,在FPGA中具有实时处理功能。千兆以太网通信。上海光学追踪联系地址山东光学追踪系统生产公司,位姿科技(上海)有限公司;
如果说人类的历史进步教会了我们什么的话,那就是真正的阶段性进展都不是来源于单一的技术突破,而是由同期的各种因素相互促成的。比如1760年,始于英国的工业革命就是由蒸汽动力的出现、铁矿产量的提升以及代机械工具的开发和使用等多重因素构成的。同样,20世纪70年代初的PC革命也是微处理、存储器、软件编程等技术端口共同发展的结果。现在,迈入2018年的我们也正处于一场新革命的风口浪尖。这场革命或将改变**每一组织、每一行业以及每一项公共服务。没错,这场革命就是属于人工智能的革命。我相信,2018年,人工智能将开始成为主流,并无处不在地影响我们的生活,为我们带来新的、有意义的改变。人工智能:其实已经有65年的历史了人工智能其实并不是一个新概念。事实上,早在1950年,计算机**艾伦·图灵就提出过一个的问题:“机器也能思考吗?”但直到6年后的1956年,“人工智能”这个词才被使用。到,经历了将近70年的努力和探索,人类终于把AI从一个概念发展到能真正进入大家生活的技术现实。当下,有三种创新趋势正在积极推动人工智能的加速发展和应用:首先是大数据。式增长的移动互联网、智能设备以及物联网无时无刻不在为世界生成新的数据。
从节点浮标按照自身序号信息在收到同步码后延迟预定时隙广播自身位置和探测目标的方位信息,主浮标累积该信息,以120s为周期随同步码广播利用累积信息计算的目标运动参数及自身位置,各浮标接收该信息后进行空间对准并获取目标位置。母船应按照正多边形布置浮标,若浮标自带动力可航行,各浮标航路终点的拓扑结构为正多边形。按照测量孔径原理,浮标的优布置位置呈直线等间隔布置且直线方向与目标航向一致,这种布置能保证测量精度达到优,但实际使用时目标航向是未知的,在这种条件下,优的拓扑结构仍为正多边形布置,原因如下:1)保证目标以任何航向航行或机动时,浮标阵的综合孔径大;2)若浮标无动力,可大程度节约布放母船的航行距离,若浮标有动力,可大程度节约多个浮标总体的航行距离,有利于浮标同时出水工作;3)各浮标综合通信距离短,有利于各浮标的无线自组织网络构建。图4多光学浮标联合定位信息流程图4联合定位计算结果与分析非线性小二乘法定位效果理论上可采用Cramer-Rao界值分析,即式(5)中H(tk)TH(tk)矩阵的逆矩阵主对角线元素[12]。实际工程中,定位误差不来源于测量的随机误差,也来源于,是各误差综合叠加的结果,很难以数学解析的形式描述。宁夏光学追踪系统生产公司,位姿科技(上海)有限公司;
单独把每个零件从装配图中拆出,或者把某个零件上的所有线条一起进行编辑。InputData项主要用于光学系统参数的输入并转化为数据文件以便于其它程序的取用。DrawLensOnly项用于不需要设计整个镜头结构时单独绘制光学系统图。SelectType项用于六种结构类型的选择。它调用了图标菜单ICON,将六种类型的结构简图用图像形式形象地显示出来,使用户很方便地选择所需要的结构类型,如图2所示。四、程序编制示例由图3系统框图可知,各个零件都编制了相应的子程序完成其结构绘制,下面以光学系统为例说明程序的编制过程。完成光学系统绘制的程序。首先从数据文件中取出组参数,利用绘图命令按照参数绘制透镜,然后循环操作取出*二组、*三组参数⋯,在距离**透镜d+t处绘制透镜,直至整个透镜系统绘制完毕。五、关键技术处理1.镜筒壁厚和压圈宽度镜筒壁厚与它的直径有关。螺纹退刀槽处的镜筒壁厚一般是整个结构中的薄之处。因此程序中以退刀槽处为壁厚基准,各种直径范围的壁厚选择由条件语句完成。在台阶式结构中中间部分各处的壁厚都与退刀槽处的壁厚相等,而在直筒式结构中中间部分的壁厚要比退刀槽处的壁厚大一些。重庆光学追踪系统生产公司,位姿科技(上海)有限公司;上海光学追踪联系地址
安徽光学追踪技术公司,可以联系位姿科技(上海)有限公司;静安区光学追踪公司地址
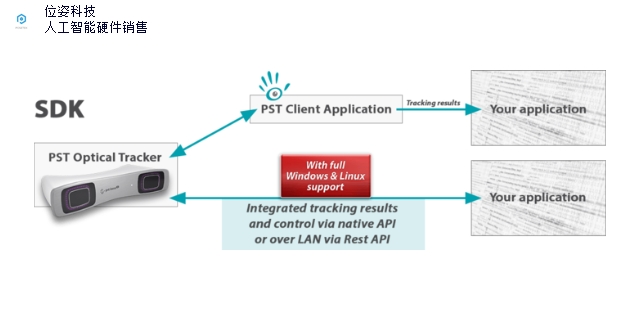
有两种类型的光学追踪标记点可与PST光学追踪系统一起使用:被动和主动标记。被动式光学追踪标记点由反光材料组成,它将射入的红外光反射回至光源。这种标记点有不同的尺寸,如扁平的圆形贴纸或球形。球形标记具有以下优点:它们可以反射来自追踪系统的各个角度的光,而平面标记点能反射与追踪系统成0到60度之间的角度的光。主动式光学追踪标记点为红外光二极管(LED)。这种标记点需要电线或电池来操作,并可直接**红外光。因为它们不依赖于对接受到的红外光进行反射,例如反光射标记点,所以它们可以在距离追踪器较远的地方使用,从而可测量容积较大。对于大多数应用来说,都可使用被动标记点。它们能提供灵活的设置,并允许用户快速将普通物体转换为追踪设。静安区光学追踪公司地址
位姿科技(上海)有限公司一直专注于业务所属领域:手术导航、手术机器人研发、医疗机器人研发、虚拟仿真、虚拟现实、三维测量等科研方向 重点销售区域:北京、上海、杭州、苏州、南京、深圳、985高校、211高校集中地 业务模式:进口欧洲精密仪器、销往全国科研机构或科研公司(TO B模式) 我们的潜在用户都是科研用户(医疗机器人研究方向、虚拟仿真研究方向),具体包括:985高校、中科院各大研究所、**医院中的科研部门、手术机器人研发公司(包含大型及创业型公司)、211高校、航空航天集团、飞机汽车等制造业研发部门、机器人测量、医疗器械检测所等。,是一家数码、电脑的企业,拥有自己独立的技术体系。公司目前拥有较多的高技术人才,以不断增强企业重点竞争力,加快企业技术创新,实现稳健生产经营。公司业务范围主要包括:光学定位,光学导航,双目红外光学,光学追踪等。公司奉行顾客至上、质量为本的经营宗旨,深受客户**。公司凭着雄厚的技术力量、饱满的工作态度、扎实的工作作风、良好的职业道德,树立了良好的光学定位,光学导航,双目红外光学,光学追踪形象,赢得了社会各界的信任和认可。
位姿科技(上海)有限公司总部位于中国上海,研发团队由国内医院临床*和医学仿真领域专业技术工程师组成。为了让技术较好的服务医疗,我们立足于智能医疗领域,致力于提升临床医疗与医疗教育的智能化水平。凭借医学仿真及机器人领域多年的技术积累,我们专注于为医疗、科研及教育用户提供手术导航定位、医学影像仿真、医疗机器人研发、科研机器人开发、三维光学测量等解决方案。我们服务的客户涵盖985高校、科研院所、**医院、医学院、航空航天、科研公司等企事业单位。公司目前已经与荷兰、德国、瑞士、丹麦、加拿大、美国等众多国外企业建立了战略合作伙伴关系。
欢迎来到位姿科技(上海)有限公司网站,我公司位于历史文化悠久,近代城市文化底蕴深厚,历史古迹众多,有“东方巴黎”美称的上海市。 具体地址是上海奉贤公司街道地址,负责人是齐雨辰。
主要经营光学定位|光学导航|双目红外光学|光学追踪。
单位注册资金:人民币 30 万元 - 50 万元。
我们的产品优等,服务优质,您将会为选择我们而感到放心,我们将会为得到您认可而感到骄傲。
本页链接:http://www.cg160.cn/vgy-69074345.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 我要给“静安区光学追踪公司地址 欢迎来电 位姿科技供应”留言
- 更多产品