- 产品描述
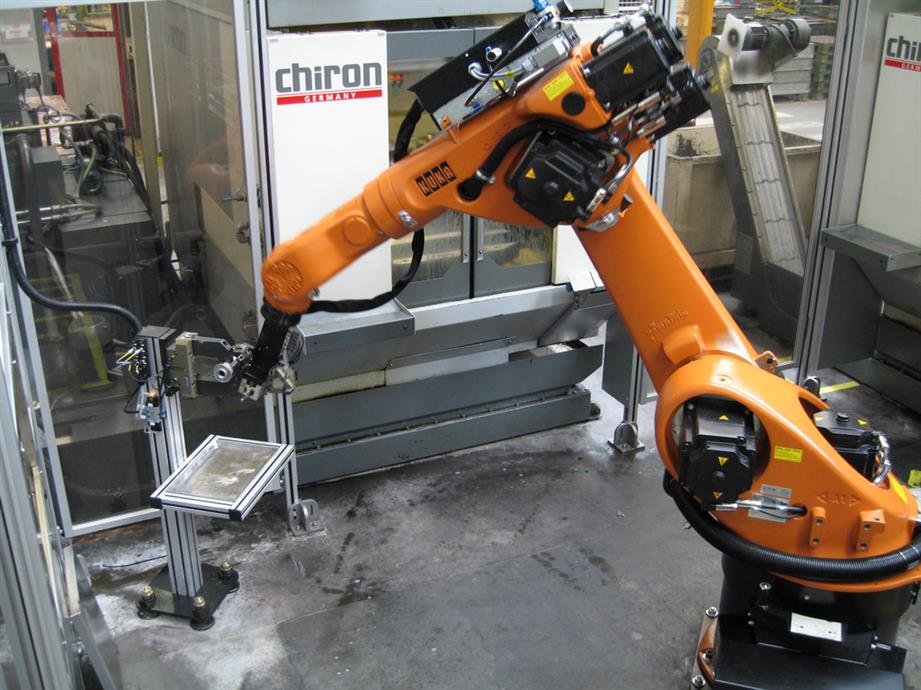
工业机器人机床上下料是在数控机床上下料环节取代人工完成工件的自动装卸功能,主要适应对象为大批量、重复性强或是工件重量较大以及工作环境具有高温、粉尘等恶劣条件情况下使用。具有定位准确、生产质量稳定、减少机床及刀具损耗、工作节拍可调、运行平稳可靠、维修方便等特点。国内的机械加工,目前很多都是使用人工或专机进行机床上下料的方式,这在产品比较单一、产能不高的情况下是非常适合的,但是随着社会的进步和发展,使用人工或专机进行机床上下料就暴露出了很多的不足和弱点;
工业机器人上下料有如下技术特点:
(1)综合性强:集机器人编程、传感器、PLC、单片机、通讯于一体,将执行机构、控制系统、驱动系统、检测系统及各专业学科**结合;
(2)设备安全便于操作:本系统使用自制的自动加工系统代替了真实的上下料机床,通讯功能完全可以取代原本的真实系统,降低了设备成本,同时便于学习者进行系统集成,同时系统采取了多重安全防护措施,保证了学习者的安全;
(3)模块化:采用分层和模块化结构设计,分别对不同的功能需要设计不同程序,在这些功能模块的相互协调下实现不同的功能,这些功能既可以单独运行,也可以与其他模块组成系统。
(4)扩展性强:除了完成机器人上下料系统的功能,本系统还可以通过改变被控机器人执行末端,变成其他功能的机器人工作站,提高了设备的使用率。
数控车床机械手又称之为车床上下料机械手、车床机械手、车床送料机械手,作为厂家,我们经常会听到客户说上下料机械手、送料机械手、车床机械手、搬运机械手等等,那么,数控车床机械手和搬运机械手有什么区别?
在工业自动化生产中,无论是单机还是组合机床,以及自动生产流水线,都要用到机械手来完成工件的取放。不同的用途,机械手的叫法不同对机械手的控制主要是位置识别、运动方向控制和物料是否存在的判别。其任务是将传送带A上的工件或物品搬运到传送带B上。机械手的上升、下移、左移、右移抓紧和放松都是用双线圈三位电磁阀气动缸完成。当某个电磁阀通电时,就保持相对应的动作,即使线圈再断电仍然保持,直到相反方向的线圈通电,相对应的动作才结束。设备上装有上、下、左、右、抓紧、放松六个限位开关,控制对应工步的结束。传送带上设有一个光点开关,监视工件到位与否。机械手用来搬运就叫搬运机械手,机械手用来上下料,就叫上下料机械手,用在车床上就叫车床机械手,用在冲压机上就交冲压机械手。
机床上下料机器人系统主要由工业机器人、料仓系统、末端夹持系统、控制系统、安全防护系统等以及客户端匹配的数控机床组成的自动化系统,通过系统集成,可以实现单台机床、加工单元、流水线和柔性加工单元的机加工自动化。数控机床上下料机器人具有速度快、柔性高、效能高、精度高、无污染等优点,是一种非常成熟的机械加工辅助手段,是发展成为柔性制造系统FMS和柔性制造单元FMC中的一个重要组成部分,把数控车床和机器人共同构成一个柔性制造系统和柔性制造单元,可以节省庞大的工件输送装置,结构简单,而且适应性强。



沈阳鹏泰工业装备有限公司位于东北老工业基地沈阳,我们专注于为客户量身设计和定制工程解决方案,并提供良好的现场调试和售后服务。我们以高品质、高效率、优方案、低成本及完善的售后服务得到客户的一致**。我公司目前专业从事机器人焊接及切割工作站、自动化装配设备、弧焊点焊专机等一系列自动化工程的研发与制造。
欢迎来到沈阳鹏泰工业装备有限公司网站,我公司位于有2300年建城史,素有“一朝发祥地,两代帝王都”之称的国家历史文化名城—沈阳。 具体地址是辽宁沈阳皇姑区公司街道地址,负责人是艾晗。
主要经营焊接机器人。
欢迎关注本公司,本公司专业经营焊接切割 焊接设备 埋弧自动焊设备 等产品,拥有经典的技术和一流的服务!
本页链接:http://www.cg160.cn/vgy-53457940.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
关于沈阳鹏泰工业装备有限公司
商铺首页 |
更多产品 |
联系方式
沈阳鹏泰工业装备有限公司位于东北老工业基地沈阳,我们专注于为客户量身设计和定制工程解决方案,并提供良好的现场调试和售后服务。我们以高品质、高效率、优方案、低成本及完善的售后服务得到客户的一致**。我公司目前专业从事机器人焊接及切割工作站、自动化装配设备、弧焊点焊专机等一系列自动化工程的研发与制造。
- 我要给“冲压机器人”留言
- 更多产品