- 产品描述
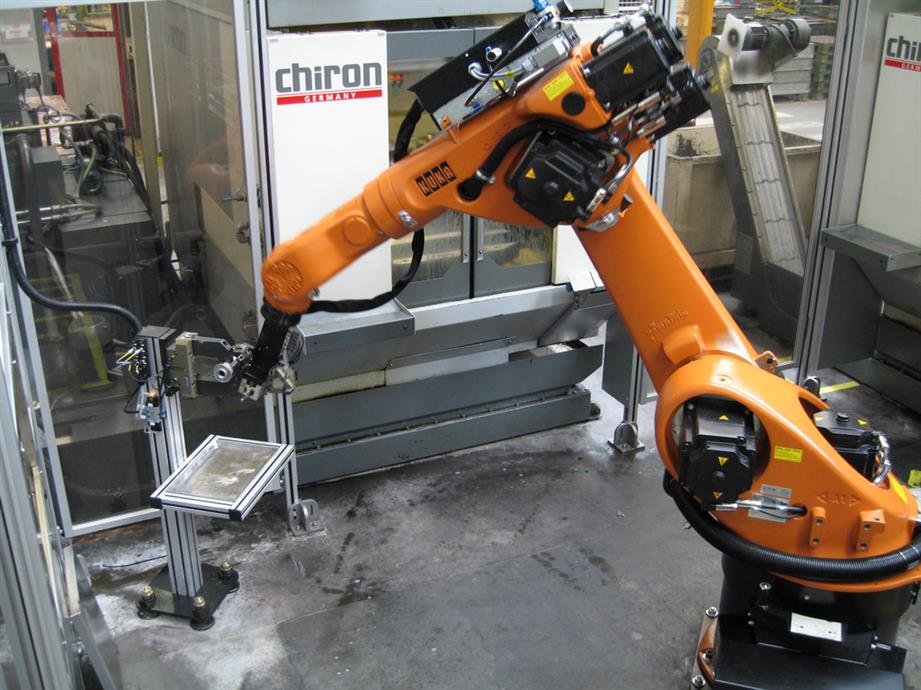
数控车床机械手又称之为数控车床上下料机械手,车床送料机械手,一般来说,车床上下料机械手一般只需要根据生产设备(如数控车床)的工艺或动作要求做代 替人工的配合即可,目前采用直角坐标机械手,通过XYZ三轴便可以实现,动作难度较低,车床上下料机械手主要是由工业机械手、工件自动识别系统、自动启动 装置、自动搬运系统等周边设备组成,通过系统集成,可以实现单台车床、加工单元、流水线和柔性加工单元的机加工自动化。具有定位准确、工作节拍可调、工作 空间大、性能优良、运行平稳可靠、维修方便等特点。
控制系统要满足以下几点要求:
(1)机器人能够在该系统中实施上下料动作;
(2)有*的安全防护措施;
(3)能够模拟机床信号发给机器人;
(4)模块化实训设备,机器人夹具能够更换;
(5)带有人机界面和PLC控制系统。
上下料机器人能满足“快速/大批量加工节拍”、“节省人力成本”、“提高生产效率”等要求,成为越来越多工厂的理想选择。上下料机器人系统具有**和高稳定性,结构简单较易于维护, 可以满足不同种类产品的生产, 对用户来说, 可以很快进行产品结构的调整和扩大产能, 并且可以大大降低产业工人的劳动强度。
上下料机器人有以下特点:
1、可以实现对圆盘类、长轴类、不规则形状、金属板类等工件的自动上料/下料、工件翻转、工件转序等工作;
2、不依靠机床的控制器进行控制,机械手采用独立的控制模块,不影响机床运转;
3、刚性好,运行平稳,维护非常方便;
4、可选:独立料仓设计,料仓独立自动控制;
5、可选:独立流水线。
上下料机械手广泛应用
玻璃加工、玻璃装卸、玻璃幕墙、塑料板材、夹芯板、复合板、钢板、铝板、铜板、石材等;适用表面较为平整致密、形状较为规则的各类工件。
上下料机械手工作原理
真空吸盘通过导气管与真空设备(如真空泵等) 接通,然后与待提升工件(如玻璃、钢板等)接触,启动真空设备抽吸,使吸盘内产生负气压,从而将待提升工件吸牢后,开始搬运待提升工件;当待提升工件搬运到目的地时,通过手滑阀,使真空吸盘内由负气压变成零气压或稍为正的气压,真空吸盘就脱离待提升工件,从而完成了提升搬运工件的任务。

沈阳鹏泰工业装备有限公司位于东北老工业基地沈阳,我们专注于为客户量身设计和定制工程解决方案,并提供良好的现场调试和售后服务。我们以**、**、优方案、低成本及完善的售后服务得到客户的一致**。我公司目前专业从事机器人焊接及切割工作站、自动化装配设备、弧焊点焊专机等一系列自动化工程的研发与制造。
欢迎来到沈阳鹏泰工业装备有限公司网站,我公司位于有2300年建城史,素有“一朝发祥地,两代帝王都”之称的国家历史文化名城—沈阳。 具体地址是辽宁沈阳皇姑区公司街道地址,负责人是艾晗。
主要经营焊接机器人。
欢迎关注本公司,本公司专业经营焊接切割 焊接设备 埋弧自动焊设备 等产品,拥有经典的技术和一流的服务!
本页链接:http://www.cg160.cn/vgy-51182248.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
关于沈阳鹏泰工业装备有限公司
商铺首页 |
更多产品 |
联系方式
沈阳鹏泰工业装备有限公司位于东北老工业基地沈阳,我们专注于为客户量身设计和定制工程解决方案,并提供良好的现场调试和售后服务。我们以**、**、优方案、低成本及完善的售后服务得到客户的一致**。我公司目前专业从事机器人焊接及切割工作站、自动化装配设备、弧焊点焊专机等一系列自动化工程的研发与制造。
- 我要给“潍坊KUKA机器人上料价格 分拣 个性定制 价格实惠”留言
- 更多产品