- 产品描述
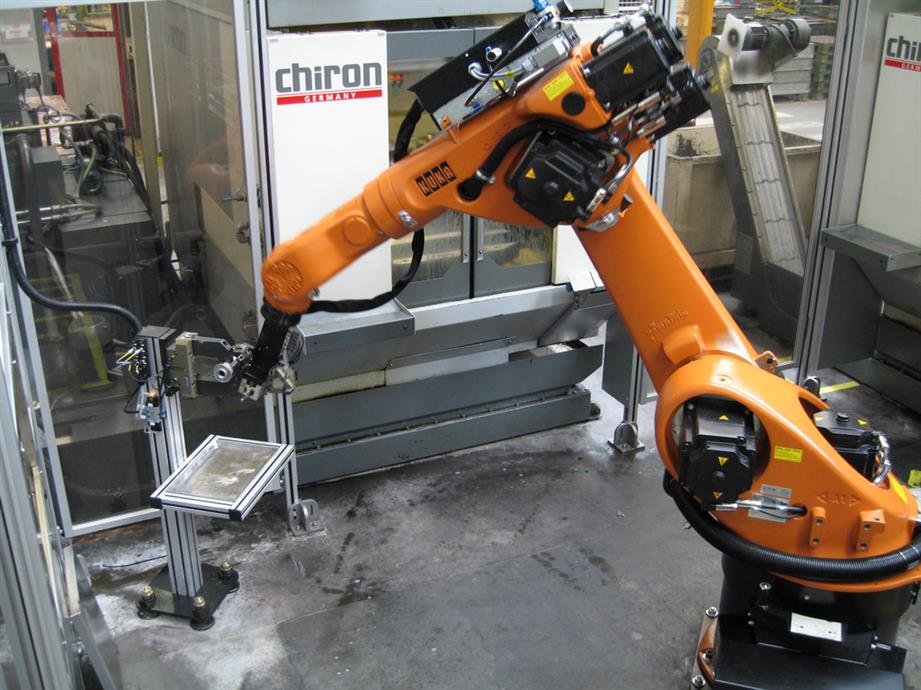
装配机器人的大量作业是轴与孔的装配,在轴与孔存在误差的情况下进行装配,需要机器人具有动作的柔顺性。主动柔顺性是根据传感器反馈的信息调整机器人手部动作,而从动柔顺心则利用不带动力的机构来控制手爪的运动以补偿其位置误差。
装配机器人主要用于各种电器制造,(包括家用电器,如电视机,录音机,洗衣机等)小型电机,汽车及其部件,计算器,玩具,机电产品及组件的装配等方面。
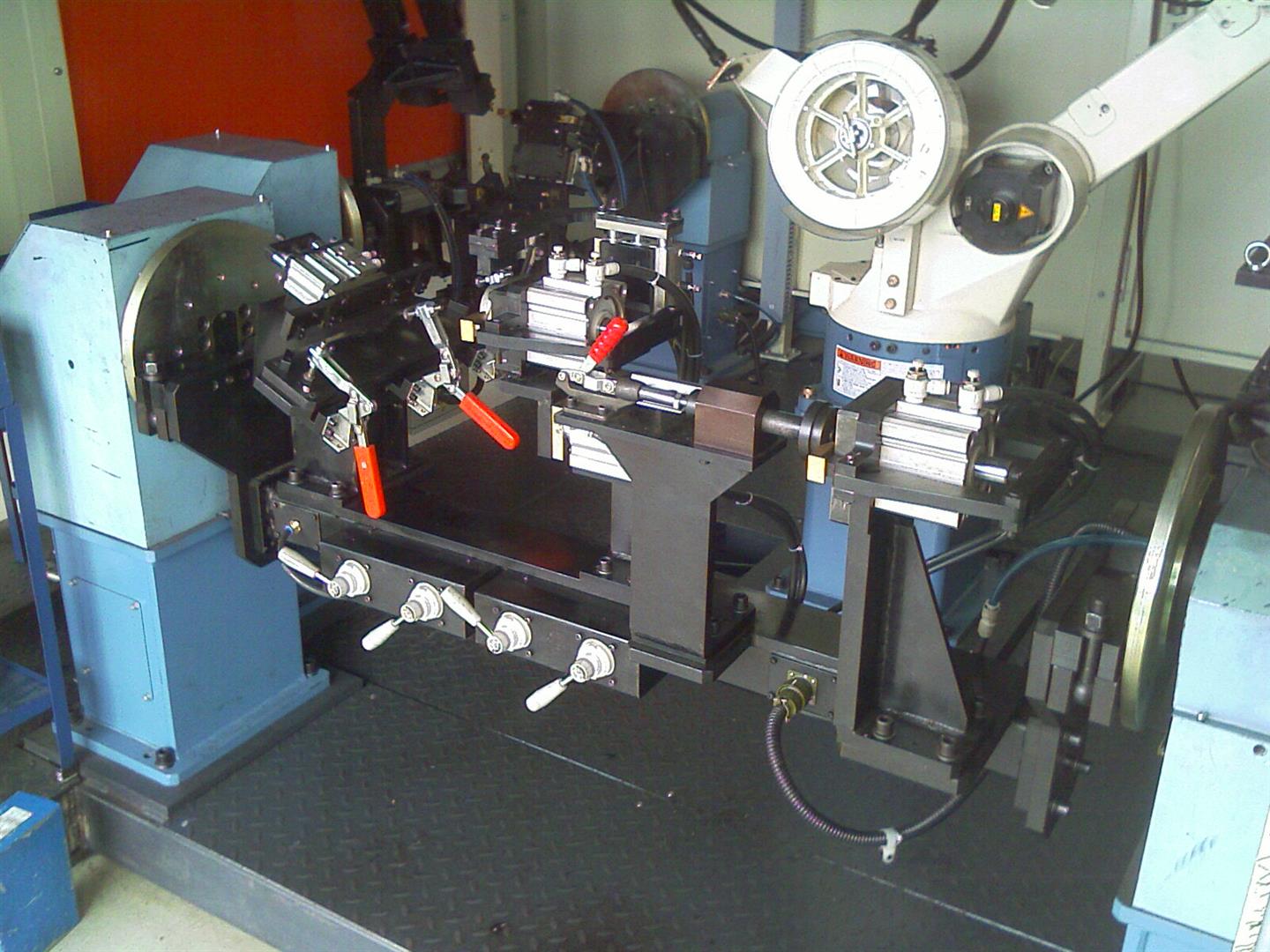
装配机器人是柔性自动化装配系统的核实设备,由机器人操作机,控制器,末端执行器和传感器系统组成,机器人的结构类型有水平关节型,直角坐标性,多关节型和圆柱坐标型等;控制器一般采用多CPU或多级计算器系统,实现运动控制和运动编程;末端执行器为适应不同的装配对象而设计成各种手爪和手腕等;传感器系统又来获取装配机器人与环境和装配对象之间相互用的信息。
装配机器人特点:
1.每台组装机器人手臂可根据工艺需要配备不同工装,以满足未来生产线多批次,小批量的多样生产要求,只需要简单的编程及工装更换即可实现快速切换。
2.机器人的**与作业的稳定性,可用于精益工业生产过程。
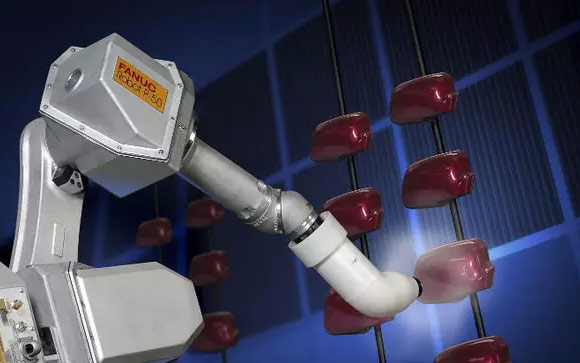
3.视觉功能,引导机器人正确识别和抓取工件,传送到精确装配位置。
4.机器人投入产出比高,设备回收期短。
为了使焊接机器人发挥**的工作,保证机器人正常运行,用户在使用机器人达到预定时间后,需对机器人本体及系统进行定期的维护和检查。同时也确保作业时设备和人员的安全,机器人每运作4000小时(或两年以上)进行一次点检。建议用户请焊接机器人专业人员进行检查。
浅谈焊接机器人的检查及保养
一.焊接机器人本体部分检查:
1.机器人本体和控制箱内装有锂电池,用于伺服电机编码器数据备份,电池的使用寿命随工作环境的不同有所变化,当**过两年时要换新电池,否则电机编码器数据将会丢失,需要重新进行原点调整,更换前需备份示教数据,防止示教程序及设定参数丢失。
2.原定的各轴标记是否重合。
3.自动运转,手动操作时看个轴运转是否平滑,稳定。
4.机器人安全开关,急停开关是否正常
5.送丝机构是否平稳。
6.减速机构是否磨损。
7.齿型带松紧调整。
8.TW, BW, RW 三轴补充润滑油(油孔不允许加普通黄油)
二.控制箱检查
1.锂电池更换。
2.散热风扇检查。
3.电缆检查(接地电缆、电源电缆、控制电缆)
4.示教器操作面板各个开关是否正常。
5.控制箱内除尘。
三.外部轴及定位夹具检查
1.锂电池更换。
2.加注润滑油。
3.连接螺栓是否紧固。
4.运行时是否有异常。
5.定位销是否有磨损。
四.焊机部分
1.焊接电源(内部除尘、连接部分有无松动)
2.焊枪(喷嘴清扫、送丝管有无阻塞、绝缘是否正常、气管有无漏气、电缆有无松动、损伤)。
3.送丝装置(送丝轮是否有磨损、SUS管有无损伤、磨损、送丝电机是否异常)。
4.接地电缆(有无烧损、裂化、连接是否紧固)。
一, 焊接机器人检查和维护
1.送丝机构。 包括送丝力是否正常,送丝管是否损坏,是否有异常报警。
2.气流是否正常?
3.割炬安全保护系统是否正常? (禁止关闭焊枪安全防护工作)
4.水循环系统是否正常工作。
5.测试TCP(建议准备测试程序,每班后运行)
二, 焊接机器人周检查和维护
1.擦洗机器人的轴。
2.检查TCP的准确性。
3.检查残留物的油位。
4.检查机器人各轴的零位是否准确。
5.清洁焊机油箱后面的过滤器。
6.清洁压缩空气入口处的过滤器。
7.清洁割炬喷嘴处的杂质,以免堵塞水循环。
8.清洁送丝机构,包括送丝轮,压线轮和导丝管。
9.检查软管束和导丝软管是否损坏和破损。 (建议拆下整个软管束并用压缩空气清洁。)
10.检查割炬安全保护系统是否正常,外部紧急停止按钮是否正常。
三. 焊接机器人每月检查和维护
1.润滑机器人的轴。 其中,1至6轴为白色,带润滑油。 油号86E006。
2.带有黄油的RTS导轨上的RP定位器和红色油嘴。 油号:86K007
3. RP定位器上的蓝色润滑脂和灰色导电油脂。 油数:86K004
4.带润滑油的送丝滚针轴承。 (可以使用少量黄油)
5.清洁喷装置并填充空气马达润滑剂。 (普通油可以)
6.用压缩空气清洁控制柜和焊机。
7.检查焊机油箱的冷却水位,及时补充冷却液(纯水加一点工业酒精)
8.除1-8的工作外,完成每周检查的所有项目。
沈阳鹏泰工业装备有限公司位于东北老工业基地沈阳,我们专注于为客户量身设计和定制工程解决方案,并提供良好的现场调试和售后服务。我们以**、**、优方案、低成本及完善的售后服务得到客户的一致**。我公司目前专业从事机器人焊接及切割工作站、自动化装配设备、弧焊点焊专机等一系列自动化工程的研发与制造。
欢迎来到沈阳鹏泰工业装备有限公司网站,我公司位于有2300年建城史,素有“一朝发祥地,两代帝王都”之称的国家历史文化名城—沈阳。 具体地址是辽宁沈阳皇姑区公司街道地址,负责人是艾晗。
主要经营焊接机器人。
欢迎关注本公司,本公司专业经营焊接切割 焊接设备 埋弧自动焊设备 等产品,拥有经典的技术和一流的服务!
本页链接:http://www.cg160.cn/vgy-51167763.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
关于沈阳鹏泰工业装备有限公司
商铺首页 |
更多产品 |
联系方式
沈阳鹏泰工业装备有限公司位于东北老工业基地沈阳,我们专注于为客户量身设计和定制工程解决方案,并提供良好的现场调试和售后服务。我们以**、**、优方案、低成本及完善的售后服务得到客户的一致**。我公司目前专业从事机器人焊接及切割工作站、自动化装配设备、弧焊点焊专机等一系列自动化工程的研发与制造。
- 我要给“长春焊接工业机器人厂家 国产机器人 尺寸精准”留言
- 更多产品