- 产品描述
圆柱坐标型?
这类机器人在基座水斗转台上装有立柱,水平臂可沿立柱作上下运动并可在水平方向伸缩。这种结构方案的优点是末端操作器可获得较高速度,缺点是末端操作器外伸离开立柱轴心愈远,其线位移分辨精度愈低。
汽车工业是点焊机器人系统一个典型的应用领域,在装配每台汽车车体时,大约60%的焊点是由机器人完成。初点焊机器人只用于增强焊作业(往己拼接好的工件上增加焊点),后来为了保证拼接精度,又让机器人完成定位焊作业。这样,点焊机器人逐渐被要求有较全的作业性能,具体来说有:?a)安装面积小,工作空间大:?
b)快速完成小节距的多点定位(例如每0·3~0.4s移动30一50灬节距后定位);?c)定位精度高(士0·25灬)以确保焊接质量?d)持重大(50、1佣),以便携带内装变压器的焊钳;?e)内存容量达,示教简单,节省工时;?
f)点焊速度与生产线速度相匹配,同时安全可靠性好。
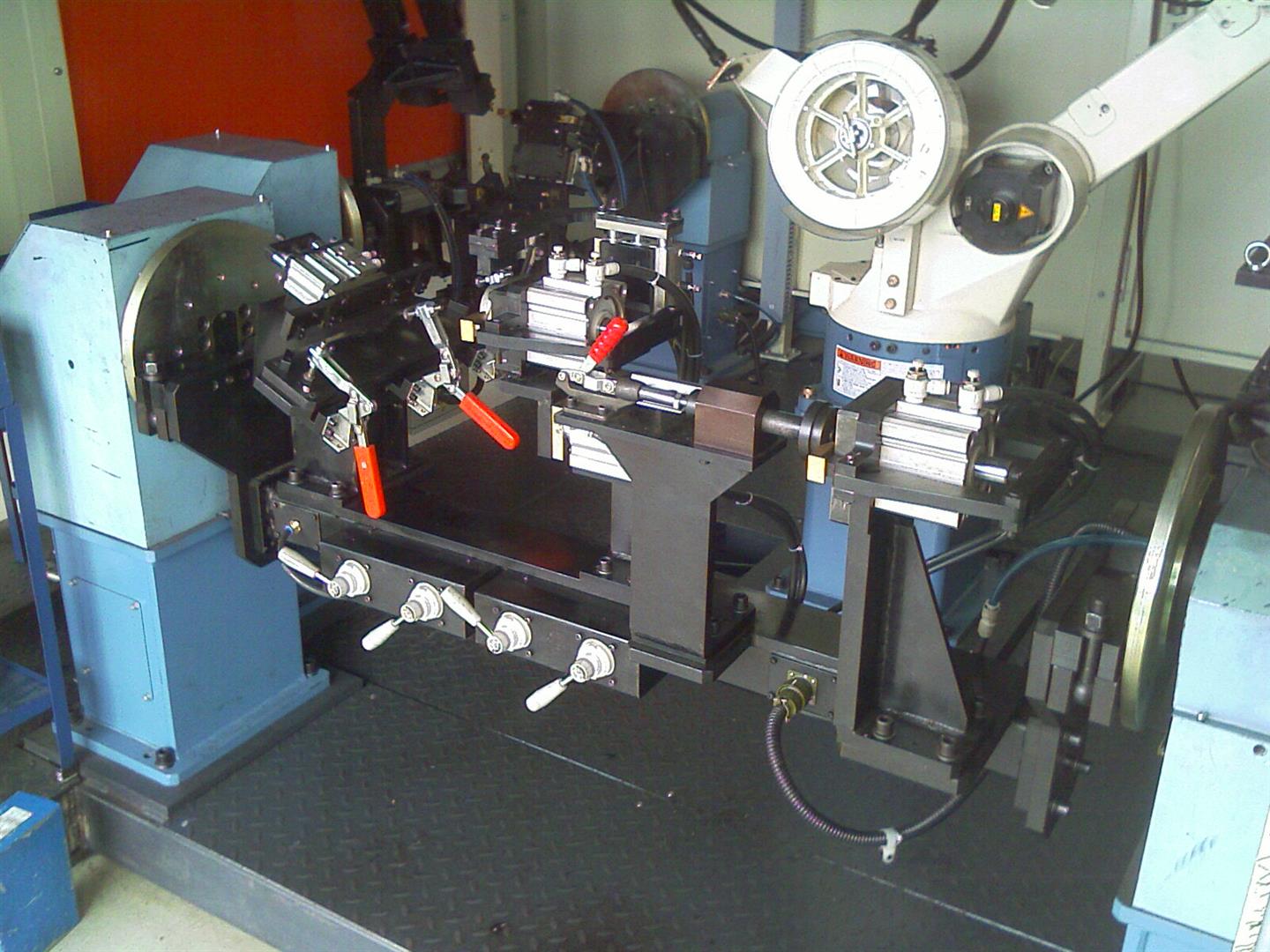
弧焊机器人
型号:SF6-K1492
弧焊机器人性能参数:
活动半径:1492mm
重复精度:±0.08mm
机器人本体重量:165KG
机器人高度:1369mm
机器人底座尺寸为384*384mm
关节数:6轴
弧焊机器人
全轴采用AC伺服电机驱动,较其节能,运行稳定。响应快
工作环境:95%RH以下(无结露)
手部负载:6KG
应用场景:弧焊、搬运、上下料
机器人本体重量165Kg驱动方式使用AC伺服电机驱动环境湿度95%RH以下


沈阳鹏泰工业装备有限公司位于东北老工业基地沈阳,我们专注于为客户量身设计和定制工程解决方案,并提供良好的现场调试和售后服务。我们以高品质、高效率、优方案、低成本及完善的售后服务得到客户的一致**。我公司目前专业从事机器人焊接及切割工作站、自动化装配设备、弧焊点焊专机等一系列自动化工程的研发与制造。
欢迎来到沈阳鹏泰工业装备有限公司网站,我公司位于有2300年建城史,素有“一朝发祥地,两代帝王都”之称的国家历史文化名城—沈阳。 具体地址是辽宁沈阳皇姑区公司街道地址,负责人是艾晗。
主要经营焊接机器人。
欢迎关注本公司,本公司专业经营焊接切割 焊接设备 埋弧自动焊设备 等产品,拥有经典的技术和一流的服务!
本页链接:http://www.cg160.cn/vgy-51138695.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
关于沈阳鹏泰工业装备有限公司
商铺首页 |
更多产品 |
联系方式
沈阳鹏泰工业装备有限公司位于东北老工业基地沈阳,我们专注于为客户量身设计和定制工程解决方案,并提供良好的现场调试和售后服务。我们以高品质、高效率、优方案、低成本及完善的售后服务得到客户的一致**。我公司目前专业从事机器人焊接及切割工作站、自动化装配设备、弧焊点焊专机等一系列自动化工程的研发与制造。
- 我要给“滨州国产焊接机器人厂家 机器人焊接 全系列全规格”留言
- 更多产品