- 产品描述
球坐标型?
与圆柱坐标结构相比较,这种结构形式较为灵活。但采用同一分辨率的码盘检测角位移时,伸缩关节的线位移分辨率恒定,但转动关节反映在末端操作器上的线位移分辨率则是个变量,增加了控制系统的复杂性.
产品介绍
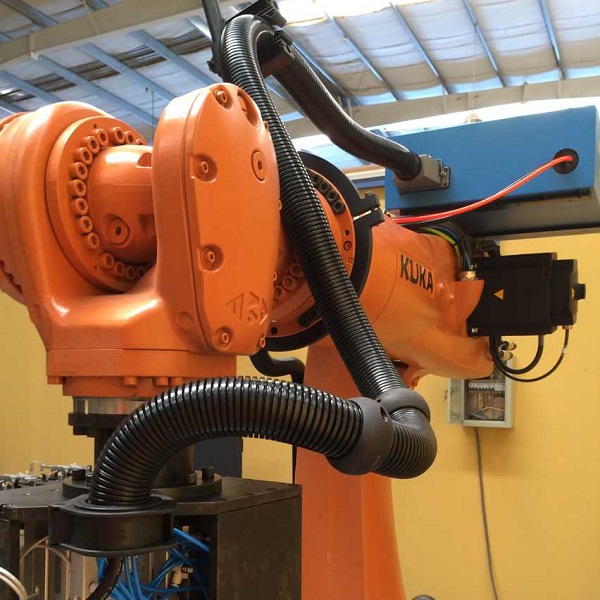
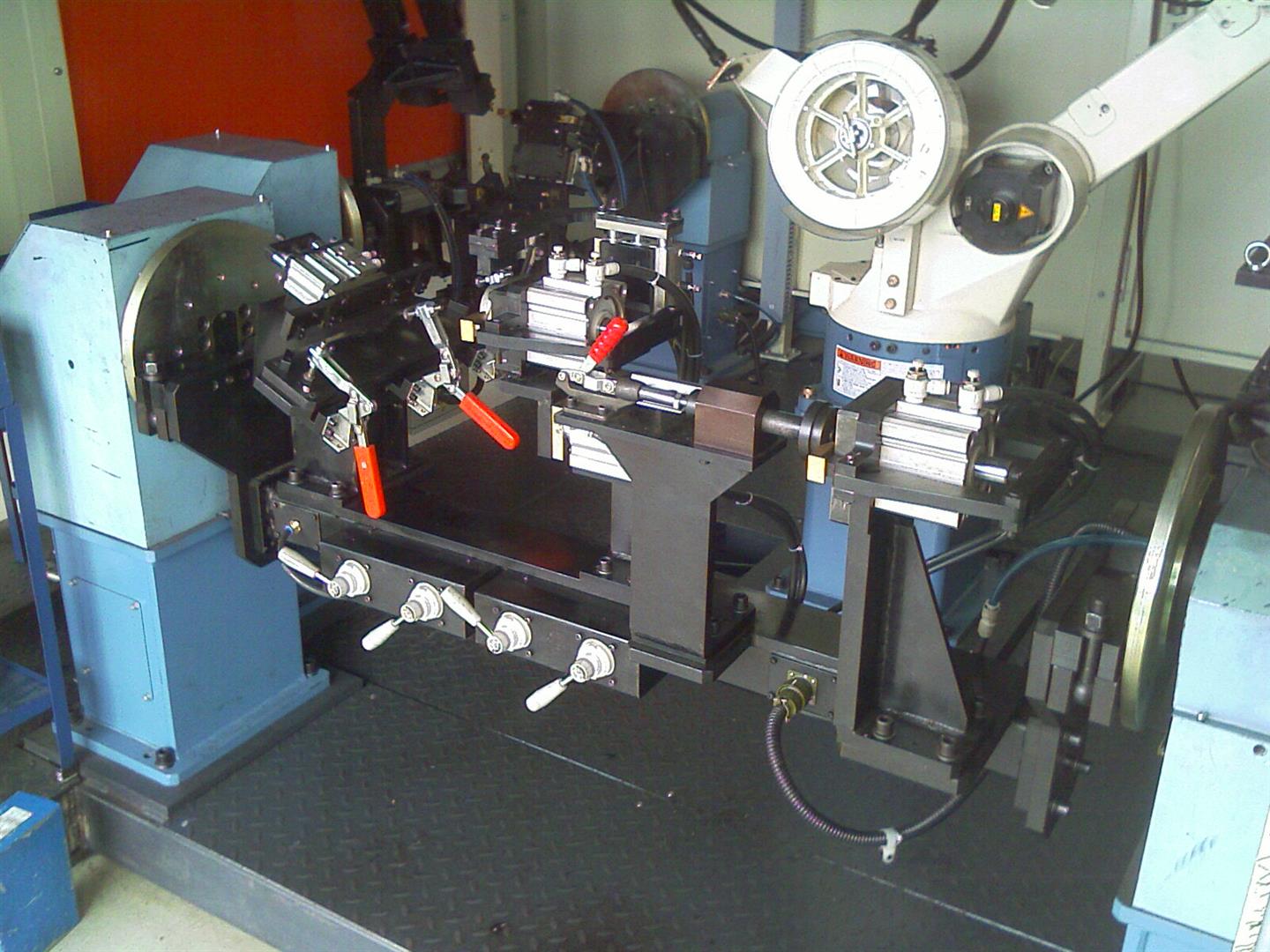
弧焊机器人的组成和原理与点焊机器人基本相同,中国在20世纪80年代中期研制出华宇-Ⅰ型弧焊机器人。一般的弧焊机器人是由示教盒、控制盘、机器人本体及自动送丝装置、焊接电源等部分组成。可以在计算机的控制下实现连续轨迹控制和点位控制。还可以利用直线插补和圆弧插补功能焊接由直线及圆弧所组成的空间焊缝。
性能特点
弧焊机器人主要有熔化较焊接作业和非熔化较焊接作业两种类型,具有可长期进行焊接作业、保证焊接作业的高生产率、高质量和高稳定性等特点。随着技术的发展,弧焊机器人人正向着智能化的方向发展。
由于机器人具有示教再现功能,完成一项焊接任务只需要人给机器人作一次示教,随后机器人可精确的再现示教的每一步操作。如果需要机器人去作另一项工作,*改变任何硬件,只要对机器人再作一次示教或编程即可,因此,在一条焊接机器人生产线上,可同时自动生产若不同产品。


沈阳鹏泰工业装备有限公司位于东北老工业基地沈阳,我们专注于为客户量身设计和定制工程解决方案,并提供良好的现场调试和售后服务。我们以高品质、高效率、优方案、低成本及完善的售后服务得到客户的一致**。我公司目前专业从事机器人焊接及切割工作站、自动化装配设备、弧焊点焊专机等一系列自动化工程的研发与制造。
欢迎来到沈阳鹏泰工业装备有限公司网站,我公司位于有2300年建城史,素有“一朝发祥地,两代帝王都”之称的国家历史文化名城—沈阳。 具体地址是辽宁沈阳皇姑区公司街道地址,负责人是艾晗。
主要经营焊接机器人。
欢迎关注本公司,本公司专业经营焊接切割 焊接设备 埋弧自动焊设备 等产品,拥有经典的技术和一流的服务!
本页链接:http://www.cg160.cn/vgy-51077614.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
关于沈阳鹏泰工业装备有限公司
商铺首页 |
更多产品 |
联系方式
沈阳鹏泰工业装备有限公司位于东北老工业基地沈阳,我们专注于为客户量身设计和定制工程解决方案,并提供良好的现场调试和售后服务。我们以高品质、高效率、优方案、低成本及完善的售后服务得到客户的一致**。我公司目前专业从事机器人焊接及切割工作站、自动化装配设备、弧焊点焊专机等一系列自动化工程的研发与制造。
- 我要给“双鸭山国产焊接机器人 机器人焊接 技术成熟 产品稳定”留言
- 更多产品