- 产品描述
是国内自动化领域的设备供应商。主要经营欧、美、日等发达国家的DCS系统模块、工业机器人备件、伺服电机驱动器、触摸屏、变频器、传感器、温控器等工控自动化产品。公司凭借的技术与商务团队,为客户带来产品的同时,还提供完善的售后服务。 长期的经营及行业积累给中海德的发展带来巨大能量,中海德与众多世界厂商形成稳定、友好合作关系,逐步积累在工控领域货源、渠道、价格、货期、服务等各方面的优势。公司秉承着“、诚信、”的经营理念,以客户需求为导向,为客户带来较全面的解决方案。坚持“整合行业优资源,力争行业好口碑”的追求,以合理的价格、完善的服务,提供的产品。
我们愿与更多的用户和国内外供应商携手并进,一起为国内工业发展贡献力量
施耐德电气拥有强大功能的MES制造执行系统则进一步确保了Lexium 18系列伺服从生产到交付,从供应商到客户的端到端全流程可追溯。该MES制造执行系统采用稳定可靠的工业SCADA作为开发基础平台,基于工业品生产特点聚焦标准工艺流程,可实现不同控制、生产系统的数据集成,并利用产线监控、生产计划、绩效管理、设备管理、报表查询和系统配置等功能模块,实现产线数据的实时监控、资源整合、信息共享和产线的快速部署。
可以说MES系统的使用,让每一台经过“精雕细琢”的Lexium 18伺服产品真正实现了“有迹可循”,这既确保了产品可以通过被长期跟踪获得长久的,也为提升整个产线的供应链一体化能力打下了数字化基础,从而形成贯穿设计、采购、生产、交付和运维的端到端绿色供应链,进一步提升上下游协同作用,共同推动相关产业生态圈的量发展。
人形机器人:全新市场带来新增量
人形机器人运动离不开驱动器,目前驱动器方案可以分为刚性驱动、弹性驱动和准直驱。双 足人形机器人关节运动特点和人类关节运动类似,运动速度较快、机动性较好,因此相比其他 驱动器,人形机器人驱动器需要具有高功率密度、高响应性、高能量利用效率和耐冲击性等特 性。参考丁宏钰等的《国内外双足人形机器人驱动器研究综述》,目前人形机器人电动驱动器 方案可以分为三类:
1) 刚性驱动:1983 年,早稻田大学研究的 WL-10R 机器人使用刚性驱动器 TSA。自此双足 人形机器人开始广泛应用刚性驱动器为关节动力源。刚性驱动器主要由电机、高传动比减 速器、编码器、力矩传感器和控制板等组成(力矩传感器是可选择项)。相比其他方案, 刚性驱动较为成熟,但能量效率相对较低一些。
2) 弹性驱动:1995 年,麻省理工学院的 Pratt 等提出了弹性驱动器 SEA( series elastic actuator) 的概念。美国宇航局的机器人 Valkyrie 和意大利技术研究院的机器人 WalkMan 都使用了弹性驱动器。弹性驱动器通过增加弹性单元来模拟肌肉系统功能,可以缓冲 外部冲击和储能,使关节表现出柔顺、安全和高能量效率特性。但由于弹性元件引入,系 统变为欠驱动系统,因此运动控制精度较低。
3) 准直驱驱动:2016 提出了准直驱方案,准直驱驱动器含义是依靠驱动器电机开环力控,不 依赖于附加力或力矩传感器,就可以本体感知机器人脚部和外界的交互力,也被称为本体 驱动器。一般方案是采用电机加低传动比减速器的方案,同时要求负载质量和转动惯量尽 可能地小,这样可以实现高带宽力控和良好的抗冲击能力。准直驱驱动器主要由高扭矩密 度电机、低传动比减速器、编码器和控制板等组成。相比其他方案,运动控制系统较为复 杂。
我们认为特斯拉人形机器人在方案方面偏好刚性驱动方案,其一体化关节(旋转关节)类似 协作机器人设计,无框力矩电机是**,利用高转速电机+高减速比减速器实现快速响应。以 协作机器人为例,一体化机器人关节主要由扭矩传感器、谐波减速机、力矩电机、制动器、增 量编码器、**值编码器和伺服驱动器组成。根据金力等《驱控一体化机器人关节的研制及应 用》,一体化机器人关节采用无框力矩电机,电机定子与关节壳体之间一般通过耐高温树脂胶 粘接或过盈配合连接。电机转子与电机轴之间一般通过树脂胶粘接。无框力矩电机的大直径长度比和多磁**对保证了电机的大扭矩输出性能和低转速特性,其转子中空结构,方便关节的内 部走线。
数控机床是制造业全自动化设备代表,这其中数控技术的应用也是其关键一环,这种技术用计算机按事先存贮的控制程序来执行对设备的运动轨迹和外设的操作时序逻辑控制功能。
采用计算机替代原先用硬件逻辑电路组成的数控装置,使输入操作指令的存储、处理、运算、逻辑判断等控制机能的实现,均可通过计算机软件来完成,处理生成的微观指令传送给伺服驱动装置驱动电机或液压执行元件带动设备运行。用于输入数字化的零件程序,并完成输入信息的存储、数据的变换、插补运算以及实现控制功能。
使用通用计算机,数控系统日趋具有了软件为主的色彩,又用PLC代替了传统的机床电器逻辑控制装置,使系统*小巧,其灵活性、通用性、可靠性*好,易于实现复杂的数控功能,使用、维护也方便,并具有与网络连接及进行远程通信的功能。
SicWave系列LBR/LFR自由射束用于连续料位测量,广泛适用于固体和液体。特别耐抗外部干扰、粉尘或附着物。得益于非接触式技术,LBR/LFR SicWave可轻松投入运行并且免维护,用于天线设计、工艺连接件和外壳的选项助力*好地适应每种应用。HART通信和蓝牙连接可简化设备的维修和诊断,为工业 4.0 应用做好理想准备。
LBR/LFR通过其天线**一个连续的信号,该信号的频率会像锯齿一样发生变化。**的信号被介质反射,并被天线作为回波接收。接受的信号频率始终偏离当前的**频率,频率之差通过传感器内部的技术算法来计算。频率的变化与容器中的物位成正比并被换算为装料高度。
施耐德UPS电源安装需注意以下几点:
1.要求UPS供电为单相三线制。(零、火、地)市电波动在220V±%以内,零地电压小于V。
2.UPS前级及负载回路不能带漏电保护开关。
3.UPS输入零线不能过断路器或保险。 单进单出系列UPS电源的具体接线方式:
1.要求UPS供电为单相三线制。(零、火、地)市电波动在220V±%以内,零地电压小于V。
2.施耐德UPS电源前级及负载回路不能带漏电保护开关。
3.施耐德UPS电源输入零线不能过断路器或保险。(如需要断零线,则零火双断。)
4.UPS电源输入零线与输出零线(即UPS负载零线)要分开,不能混接。
5.UPS电源输入火线不能与其它用电设备的火线共接一个断路器下口。
6.输入输出断路器额定电压。
7.输入零、火线、地线用多股铜软线。
8.客户如为施耐德UPS电源外配长延时电池,(建议用户将电池与UPS主机并排放置)电池与主机之间连线长度 不**过5米。
9.建议用户负载配电采用分级,多路控制方式,且下一级断路器总额定容量不应大于上一级的130%。
10.建议用户为UPS及其负载单个设置配电盘,防护等级IP。
11.UPS电源负载插座与其它非UPS负载插座要区分开。
12.施耐德UPS电源负载插座零、火线不能接反。(左零、右火,上面为地线。)
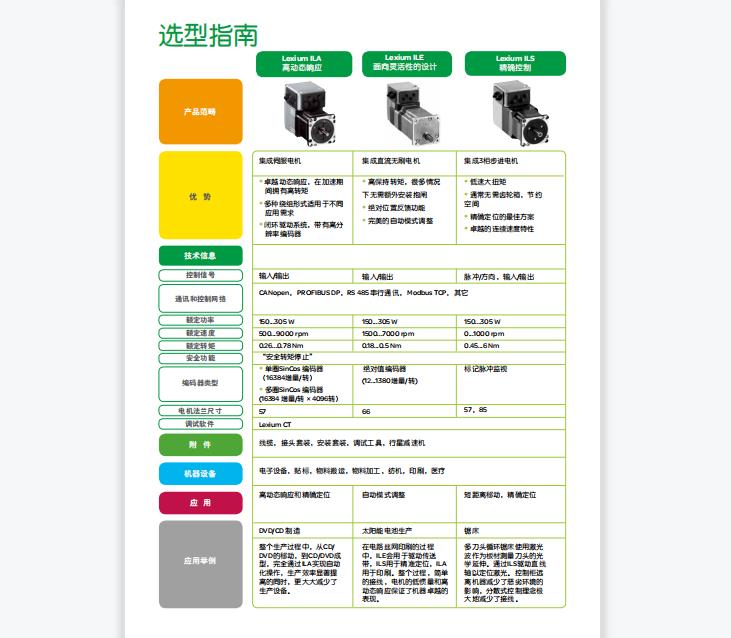
13.建议UPS电源及电池工作环境干燥,温度在20~25℃之间,湿度在30%-90%.ILA2K572TC1A0 LEXIUM ILA-控制+直流无刷电机-24..48V-ETHERNET/IP-CONN. 不当
ILA2K572TC1F0 LEXIUM ILA-控制+直流无刷电机-24..48V-ETHERNET/IP-CONN. 不当
ILA2K572TC2A0 LEXIUM ILA-控制+直流无刷电机-24..48V-ETHERNET/IP-CONN. 不当
ILA2P571PB1A0 LEXIUM 集成驱动器,伺服,POWERLINK,24-48VDC,单圈编码器
ILA2P571PB1F0 LEXIUM 集成驱动器,伺服,POWERLINK,24-48VDC,单圈 ENC.,制动器
ILA2P571PB2A0 LEXIUM 集成驱动器,伺服,POWERLINK,24-48VDC,多圈编码器
ILA2P571PC1A0 LEXIUM 集成驱动器,伺服,POWERLINK,24-48VDC,单圈编码器
ILA2P571PC1F0 LEXIUM 集成驱动器,伺服,POWERLINK,24-48VDC,单圈 ENC.,制动器
ILA2P571PC2A0 LEXIUM 集成驱动器,伺服,POWERLINK,24-48VDC,多圈编码器
ILA2P571TB1A0 LEXIUM 集成驱动器,伺服,POWERLINK,24-48VDC,单圈编码器
ILA2P571TB1F0 LEXIUM 集成驱动器,伺服,POWERLINK,24-48VDC,单圈 ENC.,制动器
ILA2P571TB2A0 LEXIUM 集成驱动器,伺服,POWERLINK,24-48VDC,多圈编码器
ILA2P571TC1A0 LEXIUM 集成驱动器,伺服,POWERLINK,24-48VDC,单圈编码器
ILA2P571TC1F0 LEXIUM 集成驱动器,伺服,POWERLINK,24-48VDC,单圈 ENC.,制动器
ILA2P571TC2A0 LEXIUM 集成驱动器,伺服,POWERLINK,24-48VDC,多圈编码器
ILA2P572PB1A0 LEXIUM 集成驱动器,伺服,POWERLINK,24-48VDC,单圈编码器



我公司具有自营工业自动化产品及技术进出口权,公司与多家国外代理商建立了长期稳定的合作关系。 公司实力雄厚,重信用、守合同、保证产品质量,以多品种经营特色和薄利多销的原则,赢得了广大客户的信任。您的认识是我们的希望,您的信任是我们的期待,您的满意是我们的追求,产品与项目是我们的桥梁,服务与沟通是我们的责任,的服务,充足的库存、期待您的来电咨询! ** 如下: 力士乐伺服驱动电机、西门子PLC备件、传感器、模块等产品。
欢迎来到中海德(福建)工业设备有限公司网站,我公司位于经济发达、文化气息浓厚、水运发达、综合实力强的福州市。 具体地址是福建福州闽侯县公司街道地址,负责人是余华清。
主要经营中海德(福建)工业设备有限公司具有自营工业自动化产品及技术进出口权,公司与多家国外代理商建立了长期稳定的合作关系,公司主营:霍尼韦尔MEASUREX测厚仪,阀门定位器等产品,欢迎来电咨询!。
本公司在机械产品这一领域倾注了无限的热忱和激情,公司一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌,携手共创美好明天!
本页链接:http://www.cg160.cn/vgy-112272743.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 扬修阀门电动头厂家 2sa8执行器 YX扬修智能隔爆执行器 扬州扬修电动阀门厂家批发 2sa8执行器 阀门启闭机 扬州阀门启闭机批发 2sa8执行器 2SA3电动执行器 山西神木化工厂压力变送器PTX7517-4426 安全使用方便 扬州电动阀门厂家 智能型 电动双向插板门尺寸900900 扬修电动阀门批发 智能型 电动执行器 山西神木陶瓷电容压力变送器KYB11G03M2 短路保护 数字信号源 性能稳定 回收E5267D信号发生器 梅特勒托利多称重接线盒安装视频 河南赛多利斯称重接线盒市场报价 圆盘粉碎机 型号:SLDB-EGSF-II-175 扬修阀门电动执行器生产厂家 2sa8执行器 阀门电动头
- 相关文章
- DMG3 0-50 mbar 三门峡Kalinsky 自动化备件HMG6 0-100 Pa 宁德Kalinsky 选购指南DMG5 AP Kalinsky 安装注意事项DS2-010 0-5000 Pa 塔城Kalinsky 产品说明书DMU2 0-1000 mbar 安阳Kalinsky 调整方法DMU4 0-25 mbar 锦州Kalinsky 工作原理DS2-010 0-6 bar 巴彦淖尔Kalinsky 仪器文献DMG3 0-50 Pa 信阳Kalinsky 进口备件V38D12RPX-95 荆门DAIKIN大金调整方法 白城Kalinsky进口备件 台州Kalinsky安装注意事项 南昌Kalinsky
我公司具有自营工业自动化产品及技术进出口权,公司与多家国外代理商建立了长期稳定的合作关系。
公司实力雄厚,重信用、守合同、保证产品质量,以多品种经营特色和薄利多销的原则,赢得了广大客户的信任。您的认识是我们的希望,您的信任是我们的期待,您的满意是我们的追求,产品与项目是我们的桥梁,服务与沟通是我们..
- 我要给“ILA1R572PB1F0 南昌自动化 图片”留言
- 更多产品











相关分类






