
- 产品描述
5、通信分系统:包括控制端通信设备和执行端通信设备,为无人船搭建执行任务所需数据链路;6、交互分系统:包括支持设备和交互软件,为操作人员对无人船实施控制,黑龙江电控一体化推进器系统集成、了解状态信息、下达自主指令等操作;任务载荷系统定义如下:任务载荷系统指无人船用以执行任务的仪器、设备、武器及配套伺服机构、装置等,一般设计为即插即用模块,可根据不同任务目的和用途规划出不同的任务载荷系统。以上内容由小豚智能整理提供,黑龙江电控一体化推进器系统集成,希望能帮到您。东莞小豚智能技术有限公司是国内的无人船行业应用解决方案供应商,公司致力于研发和销售无人船部件、无人船平台、水下机器人部件,黑龙江电控一体化推进器系统集成、无人船行业解决方案以及无人系统共性技术。已形成江豚、海豚系列无人船平台;小豚动力、小豚智控和小豚智讯等功能部件;小豚智测和小豚智教应用解决方案等系列产品。公司本着“务实,专注,创新,进取”的企业文化,结合公司*特的管理和创新理念,“助力**无人(船)智能技术,让人类生活较美好!”。大致经历了液泵式喷水推进、间歇式喷水推进、底板式喷水推进、尾板式喷水推进和舷外喷水推进5个阶段。黑龙江电控一体化推进器系统集成
无人船技术:智能控制与多传感器集成无人船的关键技术在于感知、导航和控制这三个方向。感知技术为无人船提供了眼睛和耳朵;导航技术用来接近或规避某些目标,相当于航迹规划或者是综合避障;控制技术就是无人船的运动姿态进行航线、航向的控制。其中,智能控制系统的性能,直接影响着无人船航行的操纵性、经济性和安全性。该系统总结了人的操舵规律,在测量中,自动控制无人船的航速与航向,使无人船精细沿预定测线运行,可克服各种干扰,使无人船自动、稳定地运行,是实现无人船自动作业和自动回归的技术。依靠智能控制技术,无人船能借助螺旋桨的推力和舵机来实时调节航速和航向,实现自动按照预先设定的航线进行精细的走线、换线及回归等功能。除了智能控制,无人船的关键技术还有多传感器集成与数据融合、远距离无线局域网的数据通讯与实时多模控制技术。例如,在多传感器集成方面,无人船通常会设计有一个可兼容多传感器的船载控制系统。该系统可根据用户需求灵活的搭载GNSS接收机、测深仪、ADCP(声学多普勒流速剖面仪)、电子罗盘、水质采样和在线监测仪等多种传感器设备。 北京电控一体化推进器专线推进一个*木舟使用一个单桨或侧滑一个*木舟与“橹”涉及到类似的技术。
该公司*的无人艇自主导航控制、基于视觉的水面动态目标感知等技术与产品处于****水平,其多项技术在行业内具有优势,5年来提交发明**30多项,其研制的无人艇成套装备受到关注,其研发的机艇编队协同成果,引起人民的关注以及央视新闻、解放日报、新华社、湖北日报等主流媒体的报道,其研制的关键部件、无人船(艇)应用解决方案等系列产品已面向民用市场销售,客户或合作单位有中船集团的多家研究院所、广船**、省标准化研究院、国内外多家高校、上市公司等。
东莞小豚智能技术有限公司自2015年入驻工研院以来,在耿涛和团队的共同努力下,小豚智能完成了从产品研发、实验室建设到项目落地产业化发展。在这一过程中,工研院为其提供了全链条的产业孵化服务,耿涛和团队的“科技人员实业报国”梦想逐步走进现实。他说道:“创业过程中每次遇到困难时,都是**绝不轻言放弃的精神激励着我继续坚持下去。践行“蓝色信念”,以实业报国,把论文写在祖国的大地上是我选择实现人生**的途径。”推进器(Propeller)是将任何形式的能量转化为机械能的装置。
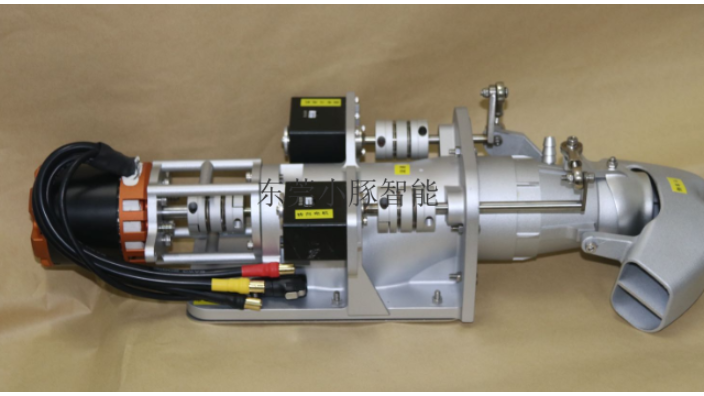
现有的船舶推进器,包括传统的舵桨推进、吊舱推进器、喷水推进器等大都是通过发动机带动螺旋桨叶片转动产生推力。基于船体布置的考虑,船舶主机和螺旋桨之间需要轴系进行传动,轴系传动导致在传递过程中损耗增大,传动效率降低,轴系还会占据大量船舱空间,降低船舱利用效率。推进轴系对于水密工艺要求较高,导致结构日趋复杂,增大船舶的设计和制造难度。同时,对于某些有特定用途的水下航行器来说,轴系震动会带来大量噪声,不利于任务的执行。随着人工智能、无人系统等新型行业的兴起,无人船作为一种新型的水面智能装备正逐步走入人们的视野,由于无人船在设计的时候多是有着明确的任务用途,无人船的自主航行也需要大量的感知传感器、控制计算单元,对于船舶的设计提出了较高的要求,传统的推进器受制于本身的布置局限性、噪音局限性并不能满足无人船的需求。因此,人们逐渐将目光转向无轴推进系统。70年代船舶喷水推进在技术上较为成熟,被军船与民船大量采用。黑龙江电控一体化推进器系统集成
可作为水面无人船、水下机器人、潜水助推器等产品的推进装置。黑龙江电控一体化推进器系统集成
2020年,团队成立产业公司东莞小豚智能技术有限公司,获得松山湖创新创业大赛(华为专场)总决赛特等奖,研发的消费级产品获“东莞杯”金奖,成立一年通过高企认证,已获青橙资本、东莞科创金融**天使轮投资,其无人船相关产品和技术已在教育、环保、船舶、测绘、应急等领域得到广泛应用。工研院作为东莞市在松山湖建设的首批重大科研机构,探索形成“体制机制新型化,团队建设专职化、技术服务规模化、产业孵化链条化”等做法。2012年被《人民日报》、《焦点访谈》专访介绍了工研院在体制机制等方面探索及成效,被誉为全国新型科研机构的典型。针对制约区域制造业发展的关键技术问题,工研院在运动控制、智能感知、无人自主技术、工业大数据、3C产业智能制造装备及大功率激光器等研发领域**突破,相关成果获国家技术发明二等奖(东莞建市以来较早)、广东省科技进步特等奖等。此外,先后发起和参与了如全国智能制造**、国家首批**制造业集群建设等一系列国家重大工程,**东莞在国家层面发出声音。黑龙江电控一体化推进器系统集成
东莞小豚智能技术有限公司总部位于松山湖园区学府路1号13栋1201室,是一家无人船、水面水下机器人的应用系统的设计、开发、租赁、技术咨询、生产与销售:电子硬件的设计和销售:软件开发和销售:机械加工、技术服务;自动化和无人自主技术转让:销售:机械设备:货物或技术进出口(国家禁止或涉及行政审批的货物和技术进出口除外)。(依法须经批准的项目,经相关部门批准后方可开展经营活动。)的公司。小豚智能拥有一支经验丰富、技术创新的专业研发团队,以高度的专注和执着为客户提供无人船,无人艇,无人系统,人工智能。小豚智能继续坚定不移地走高质量发展道路,既要实现基本面稳定增长,又要聚焦关键领域,实现转型再突破。小豚智能始终关注交通运输市场,以敏锐的市场洞察力,实现与客户的成长共赢。
东莞小豚智能技术有限公司前身为“广东省创新团队”,团队重要成员包括一批IEEE Fellow,教授和青年博士,团队2016年落地广东华中科技大学工业技术研究院,开展了5年的科研和实践,形成系列的无人船技术群体和产品系列,小豚智能创立于2020年7月,致力于将团队前期项目成果产业化运作。公司已申请无人系统领域多项相关知识产权,其中涉及诸多发明**项,相关成果已通过中国自动化协会,国家装备质量监督检验中心、广东省机械工程学会科技检测和成果鉴定。公司在东莞松山湖拥有“广东省全自主无人艇工程技术研究中心”、"东莞市全自主无人艇重点实验室”、“全自主无人艇松山湖试验基地”等研发场地。
欢迎来到东莞小豚智能技术有限公司网站,我公司位于素有“龙舟之乡、中国民间艺术之乡、举重之乡、粤剧之乡”之美誉,号为“世界工厂”的东莞市。 具体地址是广东东莞公司街道地址,负责人是耿涛。
主要经营无人船|无人艇|无人系统|人工智能。
单位注册资金:人民币 50 万元 - 100 万元。
于您,我们给您最好的产品,于您,我们给您最优质的服务,因为我们有最专业的技术,最敬业的团队,因为专业,所以精业,我公司主要有无人船|无人艇|无人系统|人工智能,欢迎您来电咨询订购!
本页链接:http://www.cg160.cn/vgy-103526490.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 迪庆重型闸门生成厂家 强劲电机 空降闸安装 深达装备 码头输油臂 扬州输油臂厂家 固永包材 安全可靠 货架货物加固 嘉兴防爆正压电气柜 安全便捷好操作 正压防爆电气箱 小袋开袋站 长沙吨袋倒袋站 厂家 固永包材 安全可靠 货物捆扎产品 自动小袋拆袋站 济南机器人自动拆包系统 厂家电话 丽江空降闸门批发 可提供上门安装服务 空降闸门维护 天津汽车鹤管供应商 汽车密闭装车鹤管 深达石化装备 三河市小型随车吊哪家好 农用工程用 操作方便 西双版纳工业闸门批发 运行稳定 空降闸门技术 德宏重型闸门批发 遇阻反弹 双机箱闸门安装
- 相关文章
- 推进器功能部件 贴心服务 东莞小豚智能供应黑龙江水下机器人推进器功能部件 诚信为本 东莞小豚智能供应黑龙江水质监测船推进器推进装置 诚信为本 东莞小豚智能供应福建通用推进器要素 抱诚守真 东莞小豚智能供应四川水下推进器 推进器要素 创新服务 东莞小豚智能供应湖北小豚推进器哪里好 创新服务 东莞小豚智能供应湖北水质监测船推进器范围 诚信为本 东莞小豚智能供应黑龙江无轴推进器推进器推进装置 创新服务 东莞小豚智能供应北京制造推进器要素 诚信为本 东莞小豚智能供应重庆水下推进器 推进器 诚信为本 东莞小豚智能供应浙江制造推进器系统集成 诚信为本 东莞小豚智能供应湖北供应推进器要素 抱诚守真 东莞小豚智能供应
- 我要给“黑龙江电控一体化推进器系统集成 贴心服务 东莞小豚智能供应”留言
- 更多产品


















