
- 产品描述
骨科是手术机器人早涉及的领域之一,也是当前手术机器人研发和产业化发展的热点领域。骨科手术机器人主要应用于创伤骨科、脊柱外科和关节外科,其中机器人辅助关节置换手术的普及度相对较高。在日益激烈的竞争格局中,国内企业加大*力度,并获得资本青睐。基于我国庞大的人口基数、社会老龄化进程的加速、质量医疗资源的逐渐下沉,以及在国家人工关节集中带量采购政策的推动下,我国骨科手术机器人市场需求有望大量释放,行业将迎来高速发展。赛道竞争激烈目前,骨科手术机器人领域呈现出多强角力的市场格局。跨国企业布局骨科手术机器人赛道的有史赛克、强生、捷迈邦美、施乐辉、美敦力等。近年来,国内多家企业也进军骨科手术机器人领域,如天智航、微创医疗、威高集团,青海导航光学测量品牌、罗森博特等。其中,以骨科手术机器人为主营业务的天智航是国内该领域的企业;威高集团等多家上市公司近年来不断拓展业务领域,也开始积极布局研发骨科手术机器人。值得关注的是,不同于跨国企业成员以收购方式进行赛道布局,国内骨科手术机器人企业主要通过联合医院,青海导航光学测量品牌,青海导航光学测量品牌、高校和科研机构等,不断加强技术协作,聚焦*。资本关注度高我国骨科手术机器人行业起步较晚; 光学跟踪及其优势光学跟踪已被证明是基于其他技术。青海导航光学测量品牌
与在训练数据中学习结构模式的传统前馈神经网络不同,LSTMs学习的是训练数据中编码模式的特征向量。LSTMs通过训练一个或多个“隐藏”Cell来实现这一点,其中每个Cell的每个时间步的输出依赖于当前输入和**个时间步的输出。这些LSTMCell的输入和输出是由一组门控制。LSTMs通常有三个门:输入门、输出门和遗忘门。通过LSTM的一层可以得到较深的特征,基于LSTM的深度特征也准确地对每一帧的人体关节之间相对位置进行了建模,同时也捕捉到了手和腿的周期性运动。之后,将情绪特征和基于LSTM的深度特征进行归一化,再将它们串联起来,利用随机森林分类器进行分类,从而得出快乐、悲伤、愤怒或者中性的情绪的概率。不仅用于常规监控的步态识别研究步态识别技术并不是什么新鲜事儿。十多年来,美国、日本和英国的科学家一直在研究这项技术。无论是用于监视并及时阻止罪犯行为,还是帮助零售业公司锁定不满的顾客,有的科学家们都试图采用相对复杂的面部识别系统。但是根据研究,只通过一个人的面部表情并不能完全准确看出一个人的情绪,许多人倾向于用身体表达情绪。或许以后结合面部表情与步态的情绪识别才是主流。而基于走路姿势的情绪识别研究除了可用于常规的监控任务。 青海导航光学测量品牌结果在使用标准评估板的实验中,两个光学(Atracsys&NDI)在位置和方向测量中的抖动比EM小。
如何把一个物体快速变成VR交互设备?人机交互设备是虚拟现实系统中不可或缺的一部分,可以提高VR系统的沉浸感和交互性。本文主要介绍在PST光学定位系统中如何轻松创建新的VR交互设备(目标物)。首先在新目标物上随机添加标记点(可使用平面反光贴、反光球或主动发光marker),然后使用PST客户端软件训练该目标物,该过程大约需要几秒钟。训练完成后,该目标物即可用于VR交互。新目标物创建为使PST的交互性能达到比较好,请保持至少四个标记点同时可见(针对红外摄像头)。为防止标记点的自身遮挡,目标物所有相邻边之间的角度应大于90°。所以,凸面物体比较适用于追踪。如下图示例,系统可以从单个视角清晰地看到多个标记点。由于PST使用IRLED面板进行环境照明,所以应注意将追踪目标物的反射率降至比较低。金属或光滑的表面会降低其追踪性能,而使用黑色物体时追踪性能为比较好。要验证目标物是否适合追踪,请在PST客户端应用程序的“查看”菜单中打开“摄像机图像”窗口。将目标物放在PST定位仪的**,并检查标记点与目标物之间的对比度是否过高,且除标记物外是否有其它反射。在比较好情况下,标记点为白色而目标物应显示为黑色。
*说,结合临床和分子数据的机器学习算法是“未来的浪潮”。一名男子走进医生的办公室,对他的胆囊进行CT扫描。胆囊很好,但医生注意到他胰腺上有问题。医生告诉他,这里有一个可能导致的囊肿,所以为了安全起见,我需要切除它。医生补充说,从手术中恢复需要三个月的时间,另外,手术并发症的几率为50%,而男性在手术台上死亡的几率为5%。据估计,美国每年有80万患者被偶然诊断出胰腺囊肿,医生们没有很好的方法来判断哪个囊肿含有致命的和良性。这种不明确性导致了数千次不必要的手术:一项研究发现,高达78%的囊肿患者被转诊为外科手术,但终没有变。现在有一种机器学习算法可以帮助我们。约翰霍普金斯大学的外科医生和计算机科学家们近日在《ScienceTranslationalMedicin(科学转化医学)》杂志上发表了一项称为“CompCyst(复合囊肿)”(用于的囊肿分析)的试验,该试验明显**的标准护理——即“医生观察和医学成像”,可预测病人是否应该回家观察,医生监测,或接受手术。约翰霍普金斯金梅尔中心胰腺囊肿项目主任AnneMarieLennon在一次关于这项研究的新闻发布会上说:“我们对这项研究的结果感到非常兴奋。”她预计将在6到12个月内为霍普金斯患者提供这项测试。 主要用于心脏外科和**腺切除术。
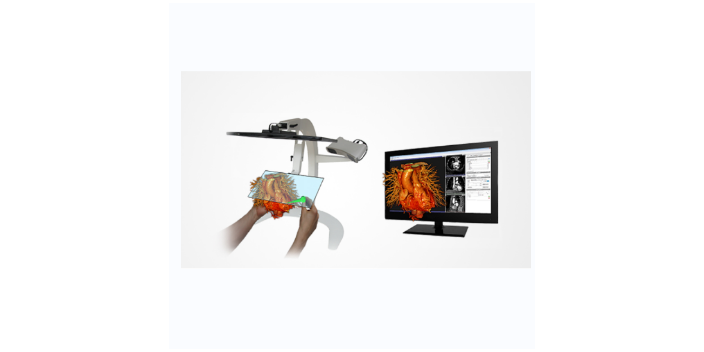
当微机器人胶囊抵达体内病患区域(比如肠道)时,外源近红外光可以穿透深层组织并引发胶囊破裂从而释放微机器人。释放出的微机器人依靠其高效游动可穿越生物屏障终实现在病患区域的滞留和持久的药物传递。微机器人系统包含的两项关键技术:(1)微机器人微机器人由内而外依次是镁球、薄金层、药物层和聚对二甲苯层组成,外面三层并未完全覆盖镁球,留下了一块类似舷窗的圆形区域,当微机器人暴露在消化液时,镁球作为机器人的“燃料”与消化中的液体发生化学反应产生小气泡推动球体运动,薄金层作为造影剂增强影响效果,聚对二甲苯层作为抵抗消化的保护层。为了保护微机器人免受胃中的恶劣环境,它们被包裹在由石蜡制成的微胶囊中。当微胶囊口服之后将会顺着消化道一直运动。一旦微机器人到达附近,就会使用高功率连续近红外激光束它们。由于微型机器人能够大量地吸收红外光,使它们被短暂地加热,微胶囊的石蜡将会熔化,使得微机器人暴露在消化液当中。未被覆盖的镁将会和消化液产生化学反应推动微机器人直到它与附近的组织碰撞。因为微机器人不具备转向功能,所以这项技术就像是一种的方法,尽管不会是所有的微机器人命中病灶区域,但是还是会很多微机器人命中目标。 使用多个摄像头,可以得出每个标记的3D位置。青海导航光学测量品牌
需要跟踪的物体配备了反射标记,可将传入的红外光反射回摄像机。青海导航光学测量品牌
且由于该领域具有较高的技术门槛,目前仍处于产业化初期。但值得关注的是,近年来我国骨科手术机器人融资市场热度不断升高,亿元级融资数量持续增长。2020年7月,天智航在科创板始发上市,募集资金。成立于2018年的创新企业元化智能,专注于骨科手术机器人研发。2021年3月,元化智能完成2亿元A轮融资;2022年1月,该企业又宣布完成数亿元B轮融资。我国骨科手术机器人领域企业备受资本青睐,预计未来该领域融资数量及融资金额都将持续上升。不过,公开资料显示,我国骨科手术机器人领域的融资主要集中在A轮和B轮,种子轮和天使轮融资数量相对较少,初创企业入局门槛较高。市场高速增长近年来,我国骨科手术机器人市场规模快速增长。Frost&Sullivan发布的数据显示,2016年,国内骨科手术机器人市场规模为410万美元左右;2019年和2020年,该行业市场规模分别达到约4720万美元和4250万美元;2021年,市场规模预计约为8040万美元(详见图)。Frost&Sullivan发布的数据还显示,在骨科手术数量大幅增加的背景下,预计到2026年,我国骨科手术机器人市场规模将达到约,市场渗透率将增至。发展潜力巨大当前,在政策、资本、市场的多重驱动下。我国骨科手术机器人行业发展迅速; 青海导航光学测量品牌
位姿科技(上海)有限公司专注技术创新和产品研发,发展规模团队不断壮大。一批专业的技术团队,是实现企业战略目标的基础,是企业持续发展的动力。诚实、守信是对企业的经营要求,也是我们做人的基本准则。公司致力于打造高品质的手术导航,手术机器人,医疗机器人,光学定位仪器。公司力求给客户提供全数良好服务,我们相信诚实正直、开拓进取地为公司发展做正确的事情,将为公司和个人带来共同的利益和进步。经过几年的发展,已成为手术导航,手术机器人,医疗机器人,光学定位仪器行业**企业。

位姿科技(上海)有限公司总部位于中国上海,研发团队由国内医院临床*和医学仿真领域专业技术工程师组成。为了让技术较好的服务医疗,我们立足于智能医疗领域,致力于提升临床医疗与医疗教育的智能化水平。凭借医学仿真及机器人领域多年的技术积累,我们专注于为医疗、科研及教育用户提供手术导航定位、医学影像仿真、医疗机器人研发、科研机器人开发、三维光学测量等解决方案。我们服务的客户涵盖985高校、科研院所、**医院、医学院、航空航天、科研公司等企事业单位。公司目前已经与荷兰、德国、瑞士、丹麦、加拿大、美国等众多国外企业建立了战略合作伙伴关系。
欢迎来到位姿科技(上海)有限公司网站,我公司位于历史文化悠久,近代城市文化底蕴深厚,历史古迹众多,有“东方巴黎”美称的上海市。 具体地址是上海奉贤公司街道地址,负责人是齐雨辰。
主要经营手术导航|手术机器人|医疗机器人|光学定位仪器。
单位注册资金:人民币 30 万元 - 50 万元。
我们公司主要供应手术导航|手术机器人|医疗机器人|光学定位仪器等产品,我们的产品货真价实,性能可靠,欢迎电话咨询!
本页链接:http://www.cg160.cn/vgy-101984731.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 安徽位移传感器 宁波液位传感器厂家 EE310-T5C1GA6GB6SBL0SBH180 淮南ntc温度传感器厂家 EE310-T5C1GA6GB6SBL0SBH180 宣城力传感器 EE310-T5C1GA6GB6SBL0SBH180 浙江压力传感器 EE310-T5C1GA6GB6SBL0SBH180 宁波流量传感器 亳州湿度传感器厂家 EE310-T5C1GA6GB6SBL0SBH180 金华温湿度传感器厂家 EE310-T5C1GA6GB6SBL0SBH180 舟山位移传感器厂家 EE310-T5C1GA6GB6SBL0SBH180 丽水超声波传感器 EE310-T5C1GA6GB6SBL0SBH180 淮北湿度传感器 EE310-T5C1GA6GB6SBL0SBH180 淮南扭矩传感器厂家 EE310-T5C1GA6GB6SBL0SBH180
- 我要给“青海导航光学测量品牌 位姿供应”留言
- 更多产品

广东新型隔音砂浆哪里买 和谐共赢 广东凯凯新材料供应

深圳三菱防爆触摸屏应用 欢迎来电 深圳市昌达自动化设备供应

深圳精密AOI检测设备设备厂家 和田古德自动化设备供应

金昌艺术高考画室找哪家 艺苑美术培训学校供应

甘肃一次性搅拌袋定制 山东华致林医药供应

辽宁房地产云计算科技房产管理系统解决方案 铸造辉煌 石家庄韬云信息科技供应
甘南彩页设计公司在那 欢迎咨询 甘肃金视觉文化传播供应

上海大型塑料破碎机生产厂家 贴心服务 恩派特环保供应

无锡6号系列空罐厂家哪家好 淮安市富盛制罐供应

青岛三轴数控加工中心品牌推荐 诚信为本 青岛凯易特数控设备供应
滤板注意事项 服务至上 杭州翔源过滤机供应







