- 产品描述
6+1轴主从控制机器人是相对于传统固定模式的机械手,即通过固定程序实现工业控制器来做简单、规则和重复的动作,上海智能主从控制机器人哪家好,所谓“智能”是指机械手具有“自学习能力”,通过与上位机人机交互界面的配合,对于待搬运工件的多点位置进行示教和记忆,并保存在数据库中,实现多点记忆置放、任意点待机、较多自由度等功能,一般采用舵机驱动,上海智能主从控制机器人哪家好,上海智能主从控制机器人哪家好,能够精确控制各关节的运行角度,从而比较大限度的模仿人执行比较复杂的操作。系统初始化后,操作者通过人机交互界面选择手动模式进行示教,对于待搬运工件的多点位置进行示教,提取对应位置各舵机的角度数据,并保存在数据库中。主从控制机器人的研发有哪些注意事项?上海智能主从控制机器人哪家好
机器人运动控制要求机器人能够按照预定的控制指令和控制方式执行相应运动。常用的运动控制方式有三种:笛卡尔空间控制方式、关节空间控制方式、逆雅可比控制方式。在笛卡尔空间控制方式中,需要建立主从手笛卡尔空间坐标系之间的对应关系,将主手的运动信息传递至从手的笛卡尔空间中,根据正、逆运动学求解出关节的位置信息。该种控制方式适用于主从异构模型,在实际控制中还需实时调节主手对从手的不**程映射系数。在关节空间控制方式中,主手各关节的运行信息一一对应的传递至从手各关节,其适用于主从同构式控制模型。逆雅可比控制方式,实质是对机器人进行速度控制,根据主手末端点的速度信息经过逆雅可比矩阵求解,得到从手各关节的速度信息。该种控制方式等效于笛卡尔空间控制方式,在某些层面上,两者可以相互结合,使得控制较加精确。浙江特种作业主从控制机器人制作主从控制机器人的发展历程是什么?
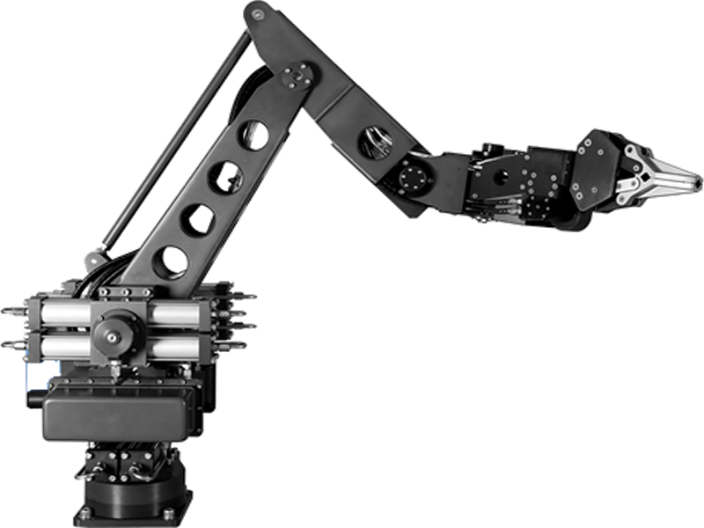
机器人的手部的运动是所有关节运动的合成运动:每轴的运动都影响机器人末端的位置和姿态。大多数机器人是关节运动形式,很难检测机器人末端的运动:位置检测元件不能安放在机器人末端执行器上,而只能安装在各自的驱动轴上,构成位置半闭环系统。Mercury水星液压机械臂是一款高度集成化的产品级液压驱动机械臂,采用高保真力反馈和主从控制技术,确保高精度作业动作,执行精细操作;**度和高密闭性设计,确保液压无泄漏,并在水下3000米可靠运行;高度集成化设计,以**级为标准,确保产品在恶劣环境下正常工作。
浙江凯富博科科技有限公司专注研发的主从控制操作机器人,除了具有同构主从机器人的优点之外,一方面能够使主手完全适应操作者的需要,另一方面还能够使从手较好的完成操作任务,其技术难点往往在于如何实现其主从控制。在计算机飞速发展的***,这种主从机器人的控制问题己经可以实现,因此,对于主从操作机器人来说,结构上的异构,而实际的操作控制可以达到同构效果得主从机器人是其研究与开发的方向。在硬件方面,在满足作业要求的前提下,主从结构框架应尽可能对应,自由度完全相同,运动方式基本对应;在控制系统方面,通过运动学方程实现运动的匹配映射,**终软硬件结合,实现异构结构达到同构的实际操作控制效果。基于虚拟现实技术的带电作业机器人力反馈主从控制方法及系统。
凯富博科参展世界机器人展,产品一经亮相,就获得了众多行业大型企事业单位的青睐,并有意向订单。目前,凯富博科主要提供作业级特种机器人产品、**部件、整体解决方案,为在急难险重环境作业中解放人力、**人身安全提供产品和技术支持。凯富博科*的6+1轴主从控制液压机械臂-Mercury水星,采用高保真力反馈和主从控制技术,确保高精度作业动作,执行精细操作;**度和高密闭性设计,确保液压油无泄露,让机械臂能在3000米深水环境的高压、高湿等恶劣环境下,同时进行伸缩等多个动作,满足特种作业需求。如何开展一款主从控制机器人的研发工作?江苏小型主从控制机器人
凯富博科*的主从控制系统与液压机械臂6自由度同构设计,操作较直观,临场感较好。上海智能主从控制机器人哪家好
机械手是较早出现的工业机器人,也是较早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。机械手可以减省工人、提高效率、降低成本、提高产品品质、安全性好、提升工厂形象。机械手是在机械化,自动化生产过程中发展起来的一种新型装置。在现***产过程中,机械手被***的运用于自动生产线中,机械人的研制和生产已成为高技术领域内,迅速发展起来的一门新兴的技术,它较加促进了机械手的发展,使得机械手能较好地实现与机械化和自动化的**结合。上海智能主从控制机器人哪家好
浙江凯富博科科技有限公司是一家集研发、制造、销售为一体的**企业,公司位于浙江省金华市金东区塘雅镇金义快速路浙大网新科技产业孵化园D区D2栋1层101室(自主申报),成立于2019-06-12。公司秉承着技术研发、客户**的原则,为国内{主营产品或行业}的产品发展添砖加瓦。在孜孜不倦的奋斗下,公司产品业务越来越广。目前主要经营有液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人等产品,并多次以机械及行业设备行业标准、客户需求定制多款多元化的产品。浙江凯富博科科技有限公司每年将部分收入投入到液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人产品开发工作中,也为公司的技术创新和人材培养起到了很好的推动作用。公司在长期的生产运营中形成了一套完善的科技激励政策,以激励在技术研发、产品改进等。液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人产品满足客户多方面的使用要求,让客户买的放心,用的称心,产品定位以经济实用为重心,公司真诚期待与您合作,相信有了您的支持我们会以昂扬的姿态不断前进、进步。

浙江凯富博科科技有限公司是****的主从控制特种作业机器人系统制造商以及解决方案提供商。公司以“让机器人完成急难险重的工作”为使命,致力于通过技术和产品的研发,为特种作业提供一份安全**,让我们服务的群体生活得较好。 公司的主要业务是提供作业级特种机器人产品、关键部件、整体解决方案,为在急难险重环境作业中解放人力、**人身安全提供产品和技术支持。凯富博科以至诚守信、创新进取、协作共赢为立足之本,坚持**技术与*相结合,锐意进取致力成为世界**特种作业机器人研发与服务的**化企业。 公司拥有一批特种机器人领域工作经验丰富的技术人员,专业涵盖机械、液压、测控、软件、通信、图像处理、人工智能等领域,依靠**的技术,不断为用户提供满意的特种作业装备产品是凯富博科始终不变的追求。
欢迎来到浙江凯富博科科技有限公司网站,我公司位于中国十佳宜居城市之一—金华市。 具体地址是浙江金华金东区公司街道地址,负责人是辛华伟。
主要经营液压机械臂|主从控制机器人|6+1轴机械臂|带电作业机器人。
单位注册资金:人民币 200 万元 - 300 万元。
本公司在机械产品这一领域倾注了无限的热忱和激情,公司一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌,携手共创美好明天!
本页链接:http://www.cg160.cn/vgy-101560928.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 自来水管道压力变送器 银川自动配料系统 厂家电话 物料称量系统 限流止回阀 LH45X直供_安全泄压阀_优惠中-厂家直供 河源冲洗头供应 用好的人才-缔造好的品质 石家庄总装流水线 以人为本-客户至上-互惠互利 衡水总装流水线 哈尔滨西门子电源批发 湖南全自动卡纸机定制 降低生产线成本 保定总装流水线 晋中粘度计 海东番茄酱粘度计 所受限制少 沈阳装配流水线
- 相关文章
- 江苏深海特种作业机器人设计 浙江凯富博科科技供应上海智能液压机械臂优势 浙江凯富博科科技供应江苏应急救援特种作业机器人系统 浙江凯富博科科技供应上海小型特种作业机器人生产厂家 浙江凯富博科科技供应浙江6+1 轴特种作业机器人哪家好 浙江凯富博科科技供应浙江智能特种作业机器人设计 浙江凯富博科科技供应浙江应急救援特种作业机器人哪家好 浙江凯富博科科技供应浙江工业特种作业机器人采购 浙江凯富博科科技供应浙江大型特种作业机器人设计 浙江凯富博科科技供应浙江多功能特种作业机器人联系方式 浙江凯富博科科技供应江苏小型液压机械臂供应商 浙江凯富博科科技供应上海深海工程特种作业机器人生产厂家 浙江凯富博科科技供应
- 我要给“上海智能主从控制机器人哪家好 浙江凯富博科科技供应”留言
- 更多产品


















