- 产品描述
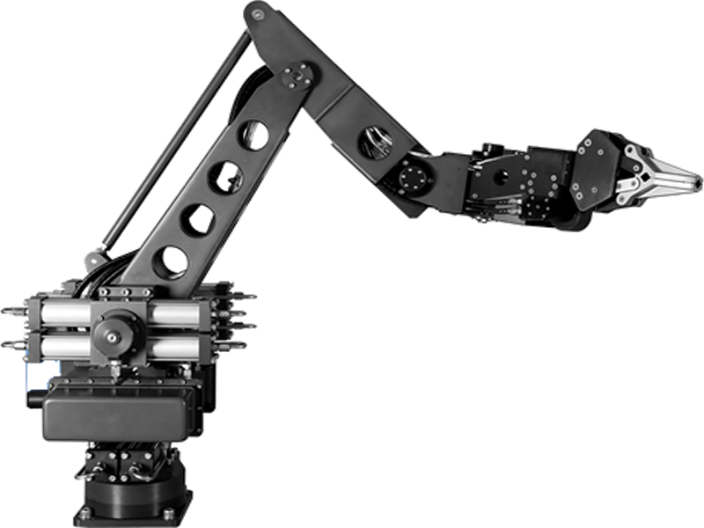
根据主手和从手的构型,可分为主从同构型和主从异构型。同构型即主手和从手的结构完全相同,只在尺寸上有所区别。该种方式的控制模式较为简单,主从映射易实现,便于从手末端点位置和姿态的控制;缺点是主手参照从手设计,通用性较差,且操作者很难以舒适的姿势进行长时间操作,不符合人因工程学。主从异构型即主手和从手结构相异,主手采用**设计,上海主从控制机器人系统,上海主从控制机器人系统。该种方式的优点是主手设计不受限制,既增加了通用性,又满足了人因工程学相关要求;缺点是控制较为复杂,上海主从控制机器人系统,需要实时求解主从系统的正逆运动学甚至动力学。浙江凯富博科科技有限公司研发的主从控制机器人值得推荐。上海主从控制机器人系统
凯富博科参展世界机器人展,产品一经亮相,就获得了众多行业大型企事业单位的青睐,并有意向订单。目前,凯富博科主要提供作业级特种机器人产品、**部件、整体解决方案,为在急难险重环境作业中解放人力、**人身安全提供产品和技术支持。凯富博科*的6+1轴主从控制液压机械臂-Mercury水星,采用高保真力反馈和主从控制技术,确保高精度作业动作,执行精细操作;**度和高密闭性设计,确保液压油无泄露,让机械臂能在3000米深水环境的高压、高湿等恶劣环境下,同时进行伸缩等多个动作,满足特种作业需求。江苏智能主从控制机器人制作主从控制机器人的采购需要哪些环节?
凯富博科*的主从控制机器人,控制系统由相应的硬件和软件组成,具有示教再现功能,可以控制系统可以通过示教盒或手把手进行示教,将动作顺序、运动速度、位置等信息用一定的方法预先教给工业机器人,由工业机器人的记忆装置将所教的操作过程自动地记录在存储器中,当需要再现操作时,重放存储器中存储的内容即可。如需更改操作内容时,只需重新示教一遍。以及运动控制功能是指对工业机器人末端操作器的位姿、速度、加速度等项目的控制。
特种作业机器人控制的方式分为:(1)机器人位置控制:定位控制方式,即固定位置方式,多点位置方式,伺服控制方式。(2)路径控制方式:连续轨迹控制,点到点控制。(3)机器人速度控制:速度控制方式,加速度控制方式。(4)机器人力控制:固定力控制,可变力控制。其控制的特点是:点位控制:*控制机器人离散点上手爪或工具的位姿,尽快而无**调地实现相邻点的运动,对运动轨迹不作控制。主要技术指标:点位精度、完成运动的时间。连续轨迹控制:连续控制机器人手爪的位姿轨迹,要求速度可控、轨迹光滑、运动平稳。主要技术指标:轨迹精度、平稳性。主从控制机器人的研发有哪些注意事项?
机器人的手部的运动是所有关节运动的合成运动:每轴的运动都影响机器人末端的位置和姿态。大多数机器人是关节运动形式,很难检测机器人末端的运动:位置检测元件不能安放在机器人末端执行器上,而只能安装在各自的驱动轴上,构成位置半闭环系统。Mercury水星液压机械臂是一款高度集成化的产品级液压驱动机械臂,采用高保真力反馈和主从控制技术,确保高精度作业动作,执行精细操作;**度和高密闭性设计,确保液压无泄漏,并在水下3000米可靠运行;高度集成化设计,以**级为标准,确保产品在恶劣环境下正常工作。主从控制机器人的设计需要哪些环节?上海主从控制机器人系统
主从控制机器人的供应商有哪些可以推荐?上海主从控制机器人系统
在手动模式下,选择适当的旋转角度,可以对机器人的六个关节分别进行粗调,也可以对机械爪进入工件、退出工件、抬起工件以及放下工件的动作进行微调。同时,根据自动生产线的生产节拍,可以输入合适的时间,并点击“暂停”按钮,系统会将此暂停时间记录下来,在自动模式下,机器人会依据此时设置的时间暂停运行。在手动模式下,操纵机器人完成从自动线上抓取工件,放到对应的工位上,设置等待加工时间,***将工件放回到自动线上。成这一系列动作之后,点击“保存”按钮,系统会将此操作过程的数据信息保存为一个文本,操作人员同时可以附上相关说明信息。操作过程中,如有操作失误,可以选择点击“复位”按钮。机器人将回到初始状态,此时需要从头开始调节机器人的动作。上海主从控制机器人系统
浙江凯富博科科技有限公司成立于2019-06-12,是一家专注于液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人的**企业,公司位于浙江省金华市金东区塘雅镇金义快速路浙大网新科技产业孵化园D区D2栋1层101室(自主申报)。公司经常与行业内技术*交流学习,研发出较好的产品给用户使用。公司主要经营液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人,公司与液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人行业内多家研究中心、机构保持合作关系,共同交流、探讨技术较新。通过科学管理、产品研发来提高公司竞争力。凯富博科,CathayBot严格按照行业标准进行生产研发,产品在按照行业标准测试完成后,通过质检部门检测后推出。我们通过全新的管理模式和周到的服务,用心服务于客户。在市场竞争日趋激烈的现在,我们承诺保证液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人质量和服务,再创佳绩是我们一直的追求,我们真诚的为客户提供真诚的服务,欢迎各位新老客户来我公司参观指导。

浙江凯富博科科技有限公司是****的主从控制特种作业机器人系统制造商以及解决方案提供商。公司以“让机器人完成急难险重的工作”为使命,致力于通过技术和产品的研发,为特种作业提供一份安全**,让我们服务的群体生活得较好。 公司的主要业务是提供作业级特种机器人产品、关键部件、整体解决方案,为在急难险重环境作业中解放人力、**人身安全提供产品和技术支持。凯富博科以至诚守信、创新进取、协作共赢为立足之本,坚持**技术与*相结合,锐意进取致力成为世界**特种作业机器人研发与服务的**化企业。 公司拥有一批特种机器人领域工作经验丰富的技术人员,专业涵盖机械、液压、测控、软件、通信、图像处理、人工智能等领域,依靠**的技术,不断为用户提供满意的特种作业装备产品是凯富博科始终不变的追求。
欢迎来到浙江凯富博科科技有限公司网站,我公司位于中国十佳宜居城市之一—金华市。 具体地址是浙江金华金东区公司街道地址,负责人是辛华伟。
主要经营液压机械臂|主从控制机器人|6+1轴机械臂|带电作业机器人。
单位注册资金:人民币 200 万元 - 300 万元。
本公司在机械产品这一领域倾注了无限的热忱和激情,公司一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌,携手共创美好明天!
本页链接:http://www.cg160.cn/vgy-101503627.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 克拉玛依无负压供水设备厂 箱式无负压供水设备 常州圣祥干燥 1200/4 真空盘式干燥机 1040-5KG|HBM数字称重传感器供应 甘肃供水无负压设备 箱式无负压供水设备 桂龙_沟槽信号蝶阀 XD381X供货商 SQB-5T|河南地磅称重传感器代理 电脑伺服控制试验机 滨州试验机 池州无负压供水设备厂 箱式无负压供水设备 常州 2000/12 盘式干燥机工作原理 北京工业检测仪哪家好 旋转闪蒸干燥机价格 圣祥干燥厂 304 忻州QL气力吸粮机销往各地 销售厂家
- 相关文章
- 江苏深海特种作业机器人设计 浙江凯富博科科技供应上海智能液压机械臂优势 浙江凯富博科科技供应江苏应急救援特种作业机器人系统 浙江凯富博科科技供应上海小型特种作业机器人生产厂家 浙江凯富博科科技供应浙江6+1 轴特种作业机器人哪家好 浙江凯富博科科技供应浙江智能特种作业机器人设计 浙江凯富博科科技供应浙江应急救援特种作业机器人哪家好 浙江凯富博科科技供应浙江工业特种作业机器人采购 浙江凯富博科科技供应浙江大型特种作业机器人设计 浙江凯富博科科技供应浙江多功能特种作业机器人联系方式 浙江凯富博科科技供应江苏小型液压机械臂供应商 浙江凯富博科科技供应上海深海工程特种作业机器人生产厂家 浙江凯富博科科技供应
- 我要给“上海主从控制机器人系统 浙江凯富博科科技供应”留言
- 更多产品


















