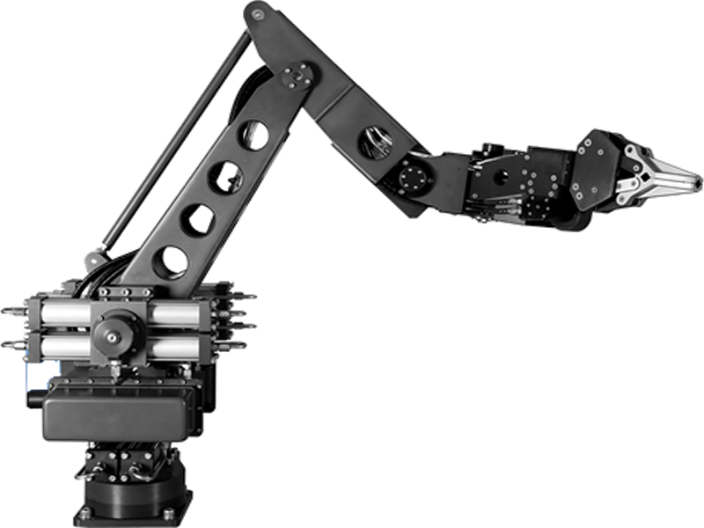
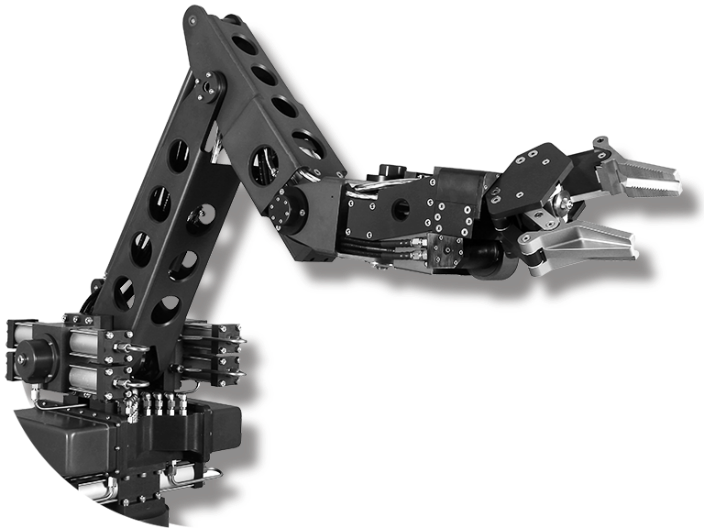
- 产品描述
主从控制,即建立主手和从手之间的映射关系,并根据此映射关系设计相应的控制方法实现主手对从手的完全控制。对于主从控制的研究主要集中于几个方面:一是主手和从手装置的配置,即结构组成,如果主手和从手之间的结构具有较高的相似度,则为同构配置;如果主手和从手装置的结构不同,关节及运动关系存在较大差异,则为异构形式;二是对主从映射方式的研究,根据主从手的结构配置来制定相应的映射方式,分别增量映射和***映射,前者是将主手的各自由度的变化量转换为从手的控制量实现控制,上海6+1 轴主从控制机器人性能,上海6+1 轴主从控制机器人性能,后者是实现从手对主手的各自由度的***位置跟踪;三是根据建立好的映射方式,通过设计相应的控制方法或策略来实现主从控制,上海6+1 轴主从控制机器人性能,以实现主手对从手的精确控制和完全控制。控制系统是机械臂的操控中心,控制驱动系统驱使执行系统按预定动作完成任务。上海6+1 轴主从控制机器人性能
控制系统是机械臂的操控中心,控制驱动系统驱使执行系统按预定动作完成任务。机械臂的分类机械臂可以根据其坐标方式、驱动方式、关节连接方式以及用途进行分类。坐标方式是指机械臂在运动时所取的参考坐标系的形式,主要有直角坐标型、圆柱坐标型、较坐标型和关节型。直角坐标型机械臂通过在直角坐标轴上的移动来使末端执行器到达预定位置,这种动作使其形成一种“伸缩—伸缩—伸缩”的运动形式。其特点是结构相对简单,定位精度较高,运动轨迹由立方体首尾相连的直角边组成,直观性强,但所占空间较大而工作范围较小,且惯性大,灵活性差。浙江特种作业主从控制机器人供应商基于虚拟现实技术的带电作业机器人力反馈主从控制方法及系统。
一般来说,机械臂或者机器人的主从控制系统的力/位混合控制的提出克服了主从控制在处理双臂协调性问题上的不足,它将两条机械臂不分主次,使两者发挥相同的作用,并且两条臂采用相同的控制器,很好的解决了两条臂控制命令耦合的情况。但是,力/位混合控制在双臂协调中存在力控制和位置控制之间转换的问题,尤其在操作状态发生变化的情况时,双臂系统力控制和位置控制存在阶跃跳变的情况,对于稳定操作物体非常不利。但CathayBot的Gemini主从控制系统主要针对电动机械臂的主从操作应用,客户可以根据实际的行业需求单纯的采用主从操作应用、也可以采用人机协同的主从操作+程控操作相结合的方式满足具体行业应用。
多轴运动的协调控制,以产生要求的工作轨迹:机器人的手部的运动是所有关节运动的合成运动,要使手部按照规定的规律运动,就必须很好地控制各关节协调动作。较高的位置精度,很大的调速范围:除直角坐标式机器人外,机器人关节上的位置检测元件通常安装在各自的驱动轴上,构成位置半闭环系统。机器人以较低的作业速度工作;空行程时,又能以较高的速度移动。系统的静差率要小:即要求系统具有较好的刚性。位置无**调,动态响应快:避免与工件发生碰撞,在保证系统适当响应能力的前提下增加系统的阻尼。需采用加减速控制:为了增加机器人运动平稳性,运动启停时应有加减速装置。主从控制机器人的供应商有哪些可以推荐?
CathayBot凯富博科以***和专业的精神,聚焦特种装备领域,通过提供较可靠的装备和较安全的作业方式,为客户、合作伙伴、股东、员工提供创造和实现美好梦想的机会。公司拥有一批特种机器人领域工作经验丰富的技术人员,专业涵盖机械、液压、测控、软件、通信、图像处理、人工智能等领域,依靠**的技术,不断为用户提供满意的特种作业装备产品是凯富博科始终不变的追求。凯富博科坚持以技术、创新取胜,立足自身优势,创新发展思路,为各个领域的客户提供**、稳定、实用的产品和整体解决方案。电力工业的主从控制机器人有哪些推荐?上海电力工业主从控制机器人制作
主从控制机器人有哪些型号可以选择?上海6+1 轴主从控制机器人性能
迄今,绝大多数主从操作机器人的主手和从手的结构是相同的或者近似相同的,在医疗机器人领域也是如此。例如,美国NASA实验室的眼科手术机器人,日本东京大学研制的遥操作显微血管缝合机器人,均采用主从同构的结构形式。这种结构的优点是主从运动直观性强,运动控制简单,操作简单;但是,主从同构机器人的设计要同时兼顾主手和从手双方的特点,不能充分满足各自的需要。然而,在系统中引入计算机之后,主从同构机器人的这种不能满足各自需要的束缚就可以摆脱了。此时,主手和从手的设计可以分别按照各自的功能和特殊的要求来考虑,设计为结构上异构,而实际的操作控制可以达到同构效果的主从形式。上海6+1 轴主从控制机器人性能
浙江凯富博科科技有限公司主要经营范围是机械及行业设备,拥有一支专业技术团队和良好的市场口碑。公司自成立以来,以质量为发展,让匠心弥散在每个细节,公司旗下液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人深受客户的喜爱。公司秉持诚信为本的经营理念,在机械及行业设备深耕多年,以技术为先导,以自主产品为重点,发挥人才优势,打造机械及行业设备良好品牌。凯富博科立足于全国市场,依托强大的研发实力,融合*的技术理念,及时响应客户的需求。
浙江凯富博科科技有限公司是****的主从控制特种作业机器人系统制造商以及解决方案提供商。公司以“让机器人完成急难险重的工作”为使命,致力于通过技术和产品的研发,为特种作业提供一份安全**,让我们服务的群体生活得较好。 公司的主要业务是提供作业级特种机器人产品、关键部件、整体解决方案,为在急难险重环境作业中解放人力、**人身安全提供产品和技术支持。凯富博科以至诚守信、创新进取、协作共赢为立足之本,坚持**技术与*相结合,锐意进取致力成为世界**特种作业机器人研发与服务的**化企业。 公司拥有一批特种机器人领域工作经验丰富的技术人员,专业涵盖机械、液压、测控、软件、通信、图像处理、人工智能等领域,依靠**的技术,不断为用户提供满意的特种作业装备产品是凯富博科始终不变的追求。
欢迎来到浙江凯富博科科技有限公司网站,我公司位于中国十佳宜居城市之一—金华市。 具体地址是浙江金华金东区公司街道地址,负责人是辛华伟。
主要经营液压机械臂|主从控制机器人|6+1轴机械臂|带电作业机器人。
单位注册资金:人民币 200 万元 - 300 万元。
本公司在机械产品这一领域倾注了无限的热忱和激情,公司一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌,携手共创美好明天!
本页链接:http://www.cg160.cn/vgy-101329377.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 咖啡除沉淀设备 304球阀生产厂家 贵州陶瓷电容压力变送器 北京高速离心喷粉塔 镇江cnc数控车床加工 小区用扫地车 私域流量运营直播软件 长轴桁架机械手 力士乐比例阀微米级控制精度有多强 江苏全自动纸箱打样机生产供应 瑞金防雷施工公司 宁波镇海区高空作业车出租
- 相关文章
- 江苏深海特种作业机器人设计 浙江凯富博科科技供应上海智能液压机械臂优势 浙江凯富博科科技供应江苏应急救援特种作业机器人系统 浙江凯富博科科技供应上海小型特种作业机器人生产厂家 浙江凯富博科科技供应浙江6+1 轴特种作业机器人哪家好 浙江凯富博科科技供应浙江智能特种作业机器人设计 浙江凯富博科科技供应浙江应急救援特种作业机器人哪家好 浙江凯富博科科技供应浙江工业特种作业机器人采购 浙江凯富博科科技供应浙江大型特种作业机器人设计 浙江凯富博科科技供应浙江多功能特种作业机器人联系方式 浙江凯富博科科技供应江苏小型液压机械臂供应商 浙江凯富博科科技供应上海深海工程特种作业机器人生产厂家 浙江凯富博科科技供应
- 我要给“上海6+1 轴主从控制机器人性能 浙江凯富博科科技供应”留言
- 更多产品


















